
Я рад с гордостью вам представить моего нового робота — RedBoard. Это робототехническая платформа двигается по всем направлениям и умеет двигать так же и клешнёй. Надеюсь, этот робот вам понравится и найдете в этой статье для себя что-то новое и интереснее…Здесь будет принципиальная схема устройства, возможная схема печатной или шаблонной платы проекта, а также прошивка контроллера Arduino, его связь с android устройством через канал связи Bluetooth и последующий алгоритм обработки данных, программа управления двигателями.
Прежде, чем начать разрабатывать какой-нибудь проект, надо сначала создать его эскиз, допустим, на бумаге. Дальше развивать эту тему, пока не станет ясно, что робот будет работать отлично и не будет никаких сомнений, что он сможет испортиться. Начиная разрабатывать RedBoard, я подумал, почему бы не сделать мне маленькую платформу, которая будет поднимать какие-нибудь вещи, а далее в будущем будет ездить у меня по дому, разумеется автоматически, и поливать цветы при помощи помпы (водяного насоса). Тогда бы мы избежали использования модуля Bluetooth hc-06 и необходимости в Android смартфоне, что в принципе неплохо. Итак, родилась идея платформы RedBoard, управляемой контроллером Arduino. Перейдем к фото устройства.
Для сборки этого робота нам необходимо:
- Деревянный брусок;
- Кронштейны и другие детали для двигателей;
- 3 Серводвигателя для манипулятора и клешни;
- 2 мотора или 2 тех же сервопривода (но их необходимо переработать в сервоприводы постоянного вращения);
- Доп. детали для соединений деталей (болты, шайбы и т.д.);
- 4 колеса;
- Краска (для тех, кому необходимо);
- Остальные компоненты для робота, т.е. микросхемы, провода и другое будут описаны в разделе Электроника.

Теперь перейдем к сборке. Берём деревянный брусок и перекрашиваем, если необходимо. Просверливаем в верхней области бруска отверстие для сервопривода. Постепенно пытайтесь вставить в отверстие серводвигатель, оберегая провод управления. Далее после прикручивания сервопривода к бруску, можно начать строить манипулятор. Затем, ставьте колёса под бруском, используя кронштейны для них. Отлично, сборка готова, теперь перейдём к схеме бота и установке электронных компонентов.
Схема:
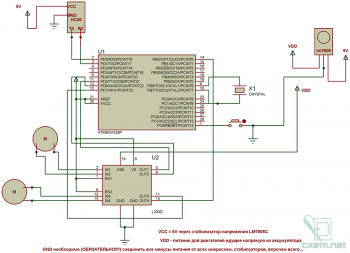
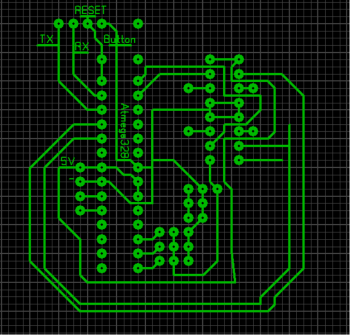
В схеме в Proteus есть также аннотации, которые необходимо прочитать! Также печатная плата в Sprint-Layout:
К микроконтроллеру Atmega 328 подключаются три сервопривода с внешним питанием, и 4 вывода от драйвера моторов l293d. Дальше hc-06 подключен к контроллеру так:
Arduino pins HC-06
RX TX
TX RX
VCC VCC
GND GND
Прошивать контроллер Arduino проще простого.
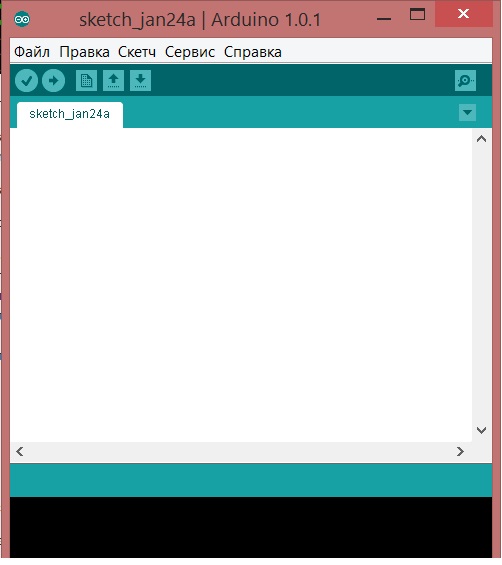
- Скачиваем Arduino IDE с сайта www.arduino.cc;
- Следуем инструкции установки и далее запускаем программу;
- Скачиваем или пишем сами программу/скетч/прошивку для нашего Arduino микроконтроллера(ссылка на исходник программы ниже);
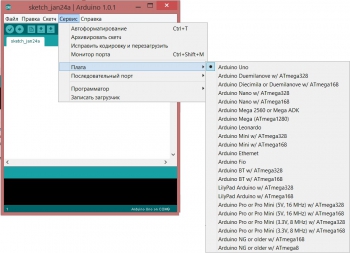
- Прошиваем, загружаем, выбрав в вкладке Сервис плату Uno, если у вас таковая, а потом Последовательный COM Порт — тот, в который вы воткнули провод из Arduino, а узнать какой com порт, можно узнать в диспетчера задач, в Мой компьютер — свойства системы — диспетчер задач. Плату будет видно во вкладке COM-порты.
- После загрузки отключаем кабель от компьютера и подключаем аккумулятор к сети робота.
- И это всё…
Выдергиваем из платы Arduino Uno микроконтроллер, если возможно, потом подключаем выводы так:
Arduino = Atmega328
Rx = Tx
Tx = Rx
VCC = VCC
GND = GND
RESET = RESET
И ещё, конечно же, подключаем к контроллеру Atmega328 кварцевый резонатор на 16 МГц.
RedBoard, в конечном итоге, управляется при помощи Android телефона. В нем установлена программа Bluetooth spp tools pro. Эту программу можно бесплатно скачать с Google Play… В программе очень легкий интерфейс. Сначала ищешь свой HC06, а потом заходишь в режим клавиатуры, значит мы будем жать на какие-то кнопки и микроконтроллерная плата должна принимать какие-то значения. Эти значения назначаются в самой программе, если нажать в настройках Button set. Эти значения уже есть в программе робота, которую я написал.
Список радиоэлементовОбозначение
Тип
Номинал
Количество
ПримечаниеМагазинМой блокнот
U1
МК AVR 8-битATmega328P1
U2
Драйвер электродвигателейL2931
Линейный регуляторLM78051
Х1
Кварцевый резонатор1
Тактовая кнопка1
М, М
Электродвигатель2
Модуль BluetoothHC-061
Добавить все
Скачать список элементов (PDF)
Прикрепленные файлы:
- redBoard.lay (21 Кб)
- robot_claw1.ino (3 Кб)
- RedBoard(1).rar (14 Кб)