









Первая часть статьи проекта CxemCAR находится здесь. Там же находятся исходники для Android и другая полезная информация. В этой статье я покажу сборку CxemCAR для платформы Arduino. В качестве платы Arduino можно использовать практически любую Arduino-совместимую плату: UNO, Nano, Mega, Leonardo и даже на основе STM32 - Arduino DUE. Я использовал платку Arduino Nano V3, приобретенную на eBay за 9$.
Схема подключения Arduino к Bluetooth модулю HC-06 и драйверу двигателей L298N:
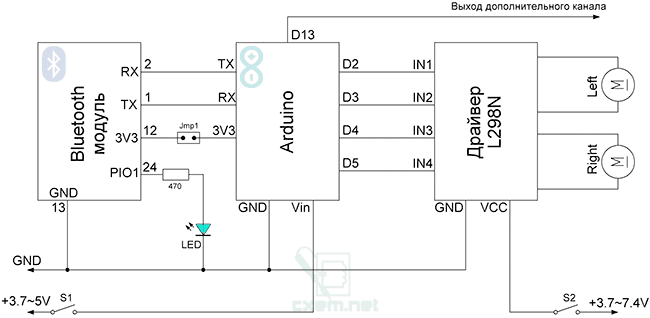
В схеме я использовал джампер (на схеме Jmp1), т.к. при подключенном Bluetooth модуле невозможно было загрузить скетч в Arduino. На время прошивки, снятием перемычки обесточивается Bluetooth-модуль.
В качестве платформы я использовал небольшую RC DIY платформу, купленную на eBay за 25$. Сама платформа представляет из себя алюминиевое основание, куда крепится два двигателя, редуктор и 4 карданные передачи для 4-х колес. Сверху, на 3-х стойках ставится макетная плата.
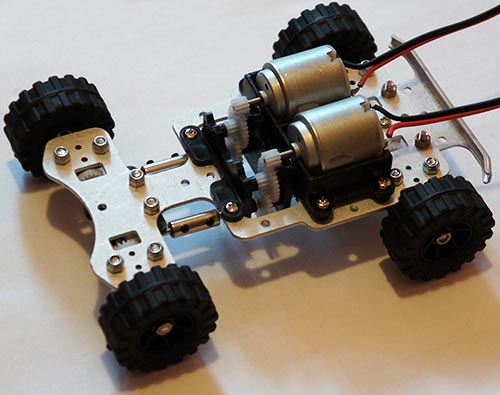
Платформа не отличается высоким качеством изготовления. После того, как я ее собрал, попробовал подключить питание - двигателя даже не шевельнулись, много перекосов, недоработок и т.п. Пришлось все разбирать, немного ослабить крепления, кое-где подточить, хорошо все промазать смазкой, а также снял 2 кардана с передней оси. Получилась заднеприводная версия машинки.
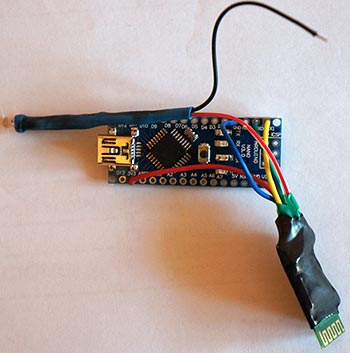
После этого, я припаял Bluetooth-модуль к Arduino и вывел для него светодиод состояния. О разновидностях Bluetooth модулей, их подключении к Arduino, работы с ними и т.п. можете почитать в данной статье: Arduino и Bluetooth. Модуль HC-06 поместил в термоусадочную трубку 10мм. Светодиод Bluetooth-состояния с токоограничительным резистором также были помещены в термоусадку, но более тонкую - 5мм.
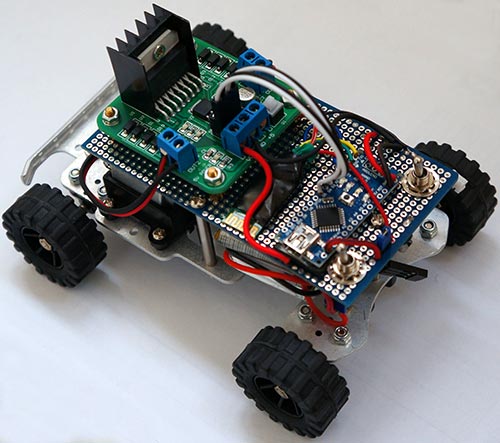
В макетной плате, которая шла вместе с платформой, я просверлил отверстия и закрепил драйвер двигателей L298N. Плату Arduino прикрепил при помощи двухстороннего скотча.
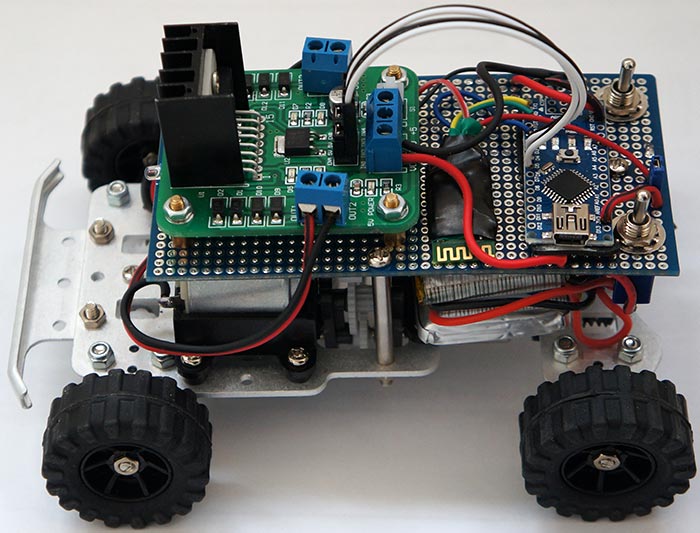
Между алюминиевой платформой машинки и макетной платой я разместил 3 Li-Po аккумулятора 3.7В 1100 мА*Ч. Питание контроллера и двигателей раздельное: Arduino запитывается от одного аккумулятора 3.7В, а моторчики и драйвер L298N от двух последовательно соединенных аккумуляторов 3.7В. Предусмотрено два 2-х позиционных выключателя питания - в одном положение питание идет от аккумуляторов к потребителям, в другом положении на клеммы зарядки.
Фото машинки на подзарядке:

Программное обеспечение
Программа писалась в среде Arduino IDE 1.01. Код программы я постарался хорошо прокомментировать, но если будут вопросы - спрашивайте на форуме, в теме поддержке проекта CxemCAR.
#include "EEPROM.h"
#define D1 2 // направление вращение двигателя 1
#define M1 3 // ШИМ вывод для управления двигателем 1 (левый)
#define D2 4 // направление вращение двигателя 2
#define M2 5 // направление вращение двигателя 2 (правый)
#define HORN 13 // доп. канал 1 подключен к 13 пину
//#define autoOFF 2500 // кол-во миллисекунд через которое робот останавливается при потери связи
#define cmdL 'L' // команда UART для левого двигателя
#define cmdR 'R' // команда UART для правого двигателя
#define cmdH 'H' // команда UART для доп. канала 1 (к примеру сигнал Horn)
#define cmdF 'F' // команда UART для работы с EEPROM памятью МК для хранения настроек
#define cmdr 'r' // команда UART для работы с EEPROM памятью МК для хранения настроек (чтение)
#define cmdw 'w' // команда UART для работы с EEPROM памятью МК для хранения настроек (запись)
char incomingByte; // входящие данные
char L_Data[4]; // строковый массив для данных левого мотора L
byte L_index = 0; // индекс массива
char R_Data[4]; // строковый массив для данных правого мотора R
byte R_index = 0; // индекс массива
char H_Data[1]; // строковый массив для доп. канала
byte H_index = 0; // индекс массива H
char F_Data[8]; // строковый массив данных для работы с EEPROM
byte F_index = 0; // индекс массива F
char command; // команда: передача координат R, L или конец строки
unsigned long currentTime, lastTimeCommand, autoOFF;
void setup() {
Serial.begin(9600); // инициализация порта
pinMode(HORN, OUTPUT); // дополнительный канал
pinMode(D1, OUTPUT); // выход для задания направления вращения двигателя
pinMode(D2, OUTPUT); // выход для задания направления вращения двигателя
/*EEPROM.write(0,255);
EEPROM.write(1,255);
EEPROM.write(2,255);
EEPROM.write(3,255);*/
timer_init(); // инициализируем программный таймер
}
void timer_init() {
uint8_t sw_autoOFF = EEPROM.read(0); // считываем с EEPROM параметр "включена ли ф-ия остановки машинки при потере связи"
if(sw_autoOFF == '1'){ // если таймер останова включен
char var_Data[3];
var_Data[0] = EEPROM.read(1);
var_Data[1] = EEPROM.read(2);
var_Data[2] = EEPROM.read(3);
autoOFF = atoi(var_Data)*100; // переменная автовыкл. для хранения кол-ва мс
}
else if(sw_autoOFF == '0'){
autoOFF = 999999;
}
else if(sw_autoOFF == 255){
autoOFF = 2500; // если в EEPROM ничего не записано, то по умолчанию 2.5 сек
}
currentTime = millis(); // считываем время, прошедшее с момента запуска программы
}
void loop() {
if (Serial.available() > 0) { // если пришли UART данные
incomingByte = Serial.read(); // считываем байт
if(incomingByte == cmdL) { // если пришли данные для мотора L
command = cmdL; // текущая команда
memset(L_Data,0,sizeof(L_Data)); // очистка массива
L_index = 0; // сброс индекса массива
}
else if(incomingByte == cmdR) { // если пришли данные для мотора R
command = cmdR;
memset(R_Data,0,sizeof(R_Data));
R_index = 0;
}
else if(incomingByte == cmdH) { // если пришли данные для доп. канала 1
command = cmdH;
memset(H_Data,0,sizeof(H_Data));
H_index = 0;
}
else if(incomingByte == cmdF) { // если пришли данные для работы с памятью
command = cmdF;
memset(F_Data,0,sizeof(F_Data));
F_index = 0;
}
else if(incomingByte == '\r') command = 'e'; // конец строки
else if(incomingByte == '\t') command = 't'; // конец строки для команд работы с памятью
if(command == cmdL && incomingByte != cmdL){
L_Data[L_index] = incomingByte; // сохраняем каждый принятый байт в массив
L_index++; // увеличиваем текущий индекс массива
}
else if(command == cmdR && incomingByte != cmdR){
R_Data[R_index] = incomingByte;
R_index++;
}
else if(command == cmdH && incomingByte != cmdH){
H_Data[H_index] = incomingByte;
H_index++;
}
else if(command == cmdF && incomingByte != cmdF){
F_Data[F_index] = incomingByte;
F_index++;
}
else if(command == 'e'){ // если приняли конец строки
Control4WD(atoi(L_Data),atoi(R_Data),atoi(H_Data));
delay(10);
}
else if(command == 't'){ // если приняли конец строки для работы с памятью
Flash_Op(F_Data[0],F_Data[1],F_Data[2],F_Data[3],F_Data[4]);
}
lastTimeCommand = millis(); // считываем текущее время, прошедшее с момента запуска программы
}
if(millis() >= (lastTimeCommand + autoOFF)){ // сравниваем текущий таймер с переменной lastTimeCommand + autoOFF
Control4WD(0,0,0); // останавливаем машинку
}
}
void Control4WD(int mLeft, int mRight, uint8_t Horn){
bool directionL, directionR; // направление вращение для L298N
byte valueL, valueR; // значение ШИМ M1, M2 (0-255)
if(mLeft > 0){
valueL = mLeft;
directionL = 0;
}
else if(mLeft < 0){
valueL = 255 - abs(mLeft);
directionL = 1;
}
else {
directionL = 0;
valueL = 0;
}
if(mRight > 0){
valueR = mRight;
directionR = 0;
}
else if(mRight < 0){
valueR = 255 - abs(mRight);
directionR = 1;
}
else {
directionR = 0;
valueR = 0;
}
analogWrite(M1, valueL); // задаем скорость вращения для L
analogWrite(M2, valueR); // задаем скорость вращения для R
digitalWrite(D1, directionL); // задаем направление вращения для L
digitalWrite(D2, directionR); // задаем направление вращения для R
digitalWrite(HORN, Horn); // дополнительный канал
}
void Flash_Op(char FCMD, uint8_t z1, uint8_t z2, uint8_t z3, uint8_t z4){
if(FCMD == cmdr){ // если команда чтения EEPROM данных
Serial.print("FData:"); // посылаем данные с EEPROM
Serial.write(EEPROM.read(0)); // считываем значение ячейки памяти с 0 адресом и выводим в UART
Serial.write(EEPROM.read(1));
Serial.write(EEPROM.read(2));
Serial.write(EEPROM.read(3));
Serial.print("\r\n"); // маркер конца передачи EEPROM данных
}
else if(FCMD == cmdw){ // если команда записи EEPROM данных
EEPROM.write(0,z1); // запись z1 в ячейку памяти с адресом 0
EEPROM.write(1,z2);
EEPROM.write(2,z3);
EEPROM.write(3,z4);
timer_init(); // переинициализируем таймер
Serial.print("FWOK\r\n"); // посылаем сообщение, что данные успешно записаны
}
}
В коде используется библиотека для работы с EEPROM памятью AVR. В памяти хранится одна настройка: количество миллисекунд через которое машинка останавливается при потери связи. Можно эту настройку "жестко" прописать в программе, для этого раскомментируйте строчку #define autoOFF 2500 (где 2500 кол-во миллисекунд). После этого, функцию Flash_Op можно удалить, также необходимо будет внести небольшие правки в код, отвечающий за прием команд для работы с EEPROM-памятью.
Плата Arduino по USART от Bluetooth модуля получает готовые данные для левого и правого двигателя. Т.е. все основные расчеты происходят в Android приложении.
- BL_4WD.ino (9 Кб)

 Опубликована: 06.01.2013
Опубликована: 06.01.2013
 Изменена: 19.07.2013
Изменена: 19.07.2013


 Вознаградить
Вознаградить




Комментарии (53) |
Я собрал (0) |
Подписаться
|
Я собрал (0) |
Подписаться
Для добавления Вашей сборки необходима регистрация
[Автор]
[Автор]
[Автор]
http://bit.ly/1w9TuZm
[Автор]
[Автор]
[Автор]
[Автор]
[Автор]
Кто скажет, если я подаю на l298n 6В, то сколько будет на выходе?
[Автор]
[Автор]
[Автор]
Если проблемы с пониманием, то попробуйте запитать от одного источника, но от броска тока могут быть лаги ардуино платки. Можно применить фильтр.
[Автор]
[Автор]
Дешевле 100$ хороших платформ под DIY думаю нет. Я уже три перепробовал, везде есть недочеты, особенно с соосностью.
[Автор]
[Автор]
[Автор]
В чем может быть проблема?