
Некоторое время назад я сделал мышь Herbie Junkbot. Мне понравился простой способ указания направления вращения двигателя при помощи ОУ и реле. Также я смотрел на шестиногого робота. Потом сайт Lego с расположение ног исчез, но я смог найти близкий по содержанию сайт.
Эту конструкцию можно рассматривать в качестве добавления шести ног к Boe-Bot. Jameco и другие фирмы производят наборы для сборки роботов.
Я решил совместить мозг Herbie с шестиногим телом Boe-Bot.

Шасси робота
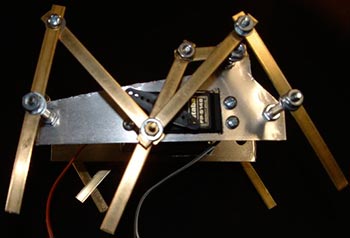
Для начала я сделал картонный макет ног, скрепленный медными штифтами, чтобы проверить работу ног. Когда я остался доволен макетом, я вырезал боковые панели из 5052 алюминия. Его толщина около 3мм.

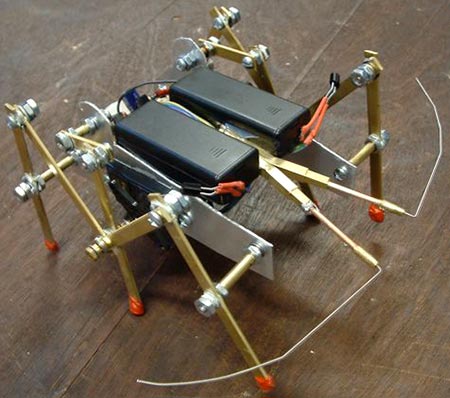
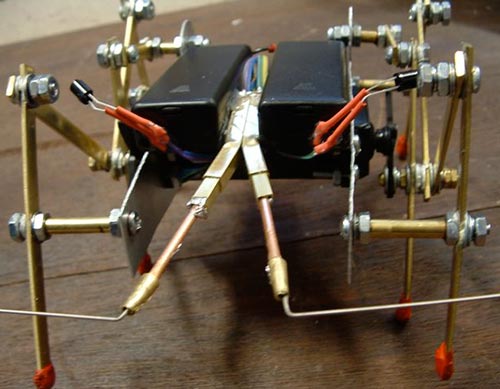
Чтобы сделать ноги, я использовал плоскую латунь. Шесть болтов длиной 40мм используются в качестве опорных точек для ног. Глядя на фотографию с видом сверху, вы видите, что я использовал болты разной длины.
Я добавил латунную трубку на болты для поддержания расстояния между телом и ногами робота. Когда сборка и установка ног была закончена, я использовал герметик для избежания ослабления соединений, во время движения.

Схема
Список деталей:
1. 1x Транзистор 2222A (похож на 3904, черный корпус с 3 выводами)
2. 1x ОУ LM 386 (микросхема с 8 выводами)
3. 1x DPDT реле (черный корпус с 10 выводами)
4. 2x Двигатели
5. 1x Резистор 1k (коричневый – черный – красный)
6. 1x Резистор 10k (коричневый – черный – оранжевый)
7. 1x Конденсатор 100uF
8. 1x Красный светодиод
9. 1x Тумблер
10. Я использовал два пластиковых держателя батарей, в каждый из которых входит 2 батареи АА.
11. Двухсторонний скотч.
12. 2x фотодиода
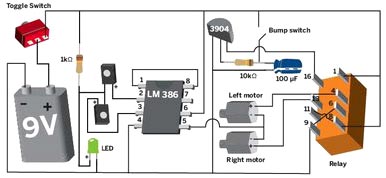
Вот хороший файл с описанием схемы. В нем учтены некоторые ошибки Herbie из журнала Make и статьи.
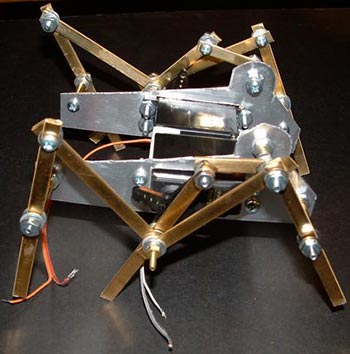
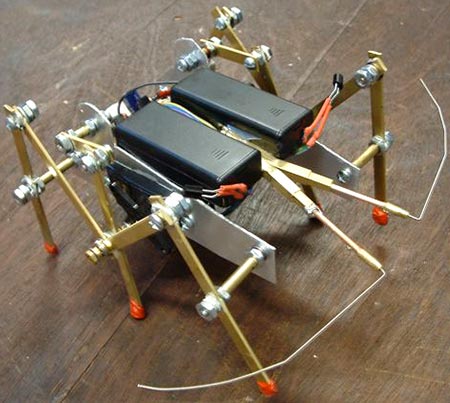
Я собрал схему на макетной плате, которую собираюсь поместить между шасси и сервоприводом.

Шасси к сервоприводу крепится при помощи 6-ти болтов 10мм и гаек. Сервоприводы были скреплены при помощи 2-хстороннего скотча.
Я снял «мозг» сервоприводов и просто припаял провода к двигателям. То есть теперь нам не нужен ШИМ сигнал для их работы.
LobsterBot в движении
Herbie Mousebot использует простой концевик рычажек для простого и быстрого определения столкновения. При столкновении схема вращает двигатели в другую сторону и робот отходит назад.

Lobsterbot использует усы-датчики. Когда усы (гитарная струна) прикасается, она гнется и вступает в контакт с латунной трубкой. Один провод датчика подключается к латунной/медной трубке, а другой к гитарной струне. Провода изолируются термоусадочной трубкой во избежания случайного контакта.
Конечно есть мертвая зона прямо перед роботом, но никто не совершенен.
Я опустил концы латунных ног Plastigoop для лучшего соприкосновения с поверхностью. Вы можете использовать ручки от инструментов.
Я считаю, что собирать Lobsterbot было интересно, мне нравится как он двигается. Также интересно управлять им при помощи фонарика в темной комнате.
На видео его можно увидеть в движении.