

На этом уроке мы продолжим изучать биполярный транзистор. Познакомимся с некоторыми дополнительными параметрами. Рассчитать каскад с общим эмиттером в ключевом […]
Рубрика: Робототехника
show all posts
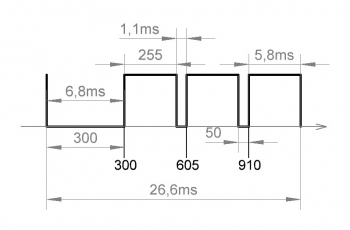
На этом уроке мы познакомимся с принципами широтной модуляции (ШИМ, PWM). Научимся регулировать скорость вращения нашего двигателя. Добавим первый орган […]

На очередном видеоуроке мы научимся регулировать скорость вращения нашего двигателя при помощи МК PIC. Разберёмся чуть подробнее с нашей ручной […]
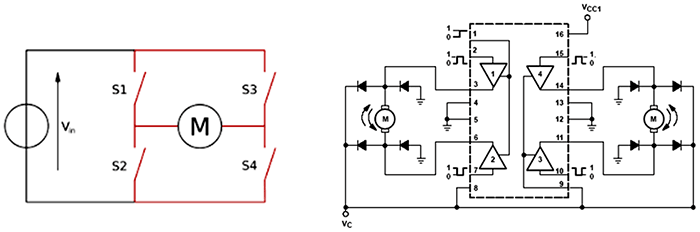
На этом уроке мы научимся изменять направление вращения с сохранением функции регулирования скорости вращения двигателя при помощи AVR-микроконтроллера компании ATMEL. Для […]
Программная реализация — передатчик. На этом уроке мы с вами уясним для себя что такое интерфейсы и протоколы. Узнаем какие […]

На этом уроке мы вспомним как управляются биполярные транзисторы, рассмотрим особенности применения в верхнем плече транзисторов обратной проводимости, упростим схему […]

На этом уроке мы продолжим разбираться с программной реализацией протокола обмена, напишем программу приёмника. Перед тем, как мы начнём необходимо […]

На этом уроке мы портируем программную реализацию интерфейса передатчика и приёмника с формированием импульсов переменной длительности на микроконтроллер PIC. Начнём […]

На этом уроке мы с Вами разберём вариант аппаратной реализации протокола обмена на основе модуля универсального асинхронного приёмопередатчика УАПП (Universal Asynchronous […]

Это проект создания управления джойстиком квадрокоптера ArDrone 2.0 c из ROS. 1. Квадрокоптер ArDrone 2.0 Parrot AR.Drone – это радиоуправляемый квадрокоптер, то […]