
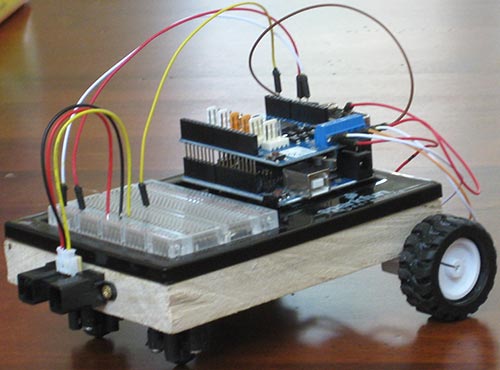
Как понятно из названия, это робот на контроллере Arduino UNO. К нему разработаны собственные библиотеки для простого и удобного использования. В обычной комплектации робот содержит два двигателя, два колеса и дальномер, установленный на передней панели. Также сверху на нём есть макетная плата для добавления разнообразных устройств на ваше усмотрение. Он работает и управляется автономно, однако к нему можно добавить радиоуправление. В этой статье описана работа с ним и библиотеками и есть несколько примеров.
Что такое библиотека?
Библиотека облегчает управление CARduino. Этот проект рассчитан на людей с небольшим опытом в программировании, которые хотят делать простых роботов. Вам даже не нужно знать, как управлять мотором. Библиотека сводит программу до простых команд «Повернуть направо и проехать 1 секунду» или «Ехать вперед 3 секунды, а далее ускориться». Библиотека также содержит примеры программ, которые помогут вам. Более подробная информация о библиотеке содержится в конце статьи.
Если у меня нет таких же материалов, я могу использовать другие?
Конечно, вы можете собирать робота как вам угодно. Библиотека будет работать практически независимо от сборки. К примеру, вы можете использовать другой материал для шасси. Я использовал дерево, потому что смог найти лишь его.
Что может сделать робот?
Он может делать все что угодно. Даже без дополнительных устройств его возможности практически не ограничены. При помощи библиотеки CARduino, писать программу для Arduino очень легко. Дополнительная макетная плата позволяет добавлять разнообразные датчики.
Какая стоимость робота?
Если собирать его с нуля, то около 100$. У меня были почти все части, поэтому он обошелся мне примерно в 30$. Все компоненты достаточно распространены и должны у вас быть.
Детали
1х Arduino Uno.
1х Макетная плата.
1х Разъёмы для Arduino и макетной платы.
1х Дальномер Sharp.
2х Микро мотора.
Пара колес 49×19мм.
Пара кронштейнов для двигателя.
Пара шариковых колёс .
Драйвер моторов для Arduino.
1х Кусок дерева 15×10.75 см.
12х Шурупов.
1х 9В батарея
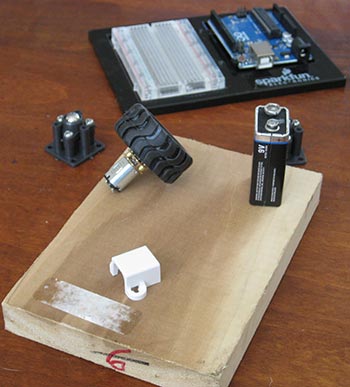
Подготовка шасси робота
Перед началом сборки необходимо вырезать кусок дерева необходимых размеров, прикрепить шариковые колёса как описано ниже, прикрепить основные колёса, установит макетную плату и Arduino на основу.
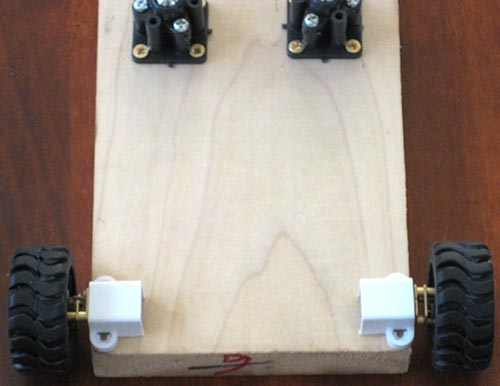
Установка шариковых колёс
Установите оба колеса сзади, с обеих сторон. Отметить места, на которые попадают их крепёжные отверстия и просверлите их. Используйте шурупы для крепления.

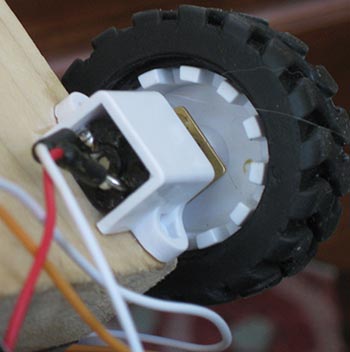
Установка моторчиков
Это довольно просто. Все, что вам нужно сделать — это вставить двигатели в кронштейн и прикрепить их на углах доски. Вы можете припаять провода к ним. Не перепутайте положительные и отрицательные контакты.
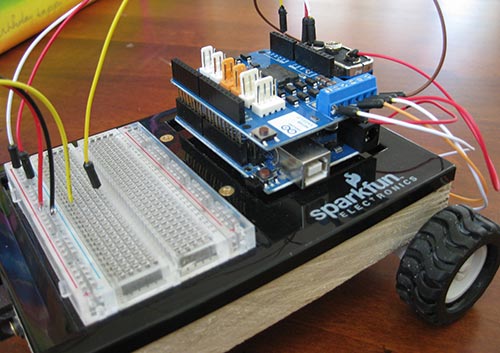
Установка Arduino и макетной платы
Вы должны начать с центрирования Arduino и макетной платы на шасси. Отметьте отверстия держателя и просверлите их. Потом прикрепите основу с макетной платой и Arduino шурупами.
Установка датчика
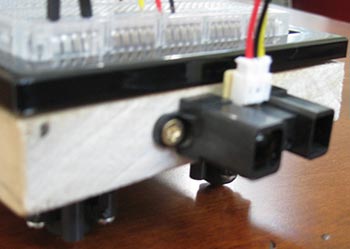
Расположите датчик спереди и посередине, отметьте крепёжные отверстия и просверлите их. Вы должны использовать отверстия на обоих сторонах датчика. Используйте шурупы для крепежа. Убедитесь, что при установке JST выводы находится вверху. Вставьте JST провода в датчик.
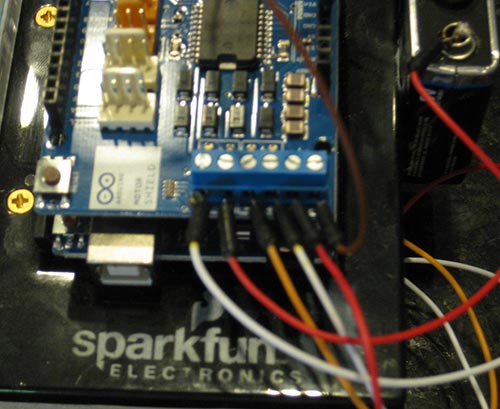
Красный провод присоедините к + макетной платы, черный к GND, а желтый в любую другую точку. После этого подключите драйвер моторов к Arduino.
Подключение двигателей колес к драйверу
Подключите положительный контакт правого двигателя к отрицательному контакту А драйвера.
Подключите отрицательный контакт правого двигателя к отрицательному контакту А драйвера.
Подключите положительный контакт левого двигателя к отрицательному контакту В драйвера.
Подключите отрицательный контакт левого двигателя к отрицательному контакту В драйвера.
Подключение питания и датчика
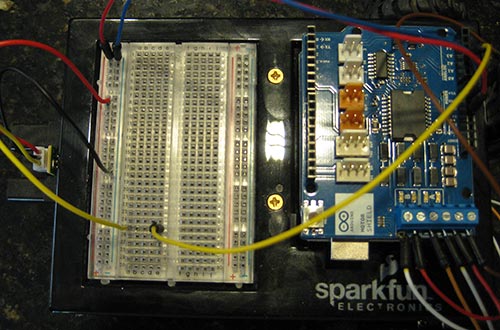
Подключите 5В к + макетной платы, а GND к GND макетной платы. Желтый провод датчика подключите ко второму контакту АЦП.
Установка батареи
Просто приклейте её супер клеем на задней панели CARduino. Затем присоедините + и GND к + и GND Carduino.
Вы закончили сборку робота! На нем без изменений будет работать библиотека и тестовые программы. Подробнее о этом написано ниже.
Библиотека
Для установки библиотеки скачайте Carduino.zip ниже. Найдите / arduino-1.0/libraries. Извлеките содержимое архива в эту папку.. Чтобы использовать её, откройте Arduino IDE и последуйте по пути -> import library -> Carduino.
Значение функций:
void mycarduino.begin ()
Инициализация CARduino. Напишите эту команду в начале программы.
void mycarduino.goforward (время в секундах, скорость)
Эта функция перемещает CARduino вперед в течении указанного времени с указанной скоростью. Скорость может быть любым числом от 1 до 1023, 1023 – максимальная скорость.
void mycarduino.goback (время в секундах, скорость)
То же самое, лишь назад.
void mycarduino.turnright (время)
Поворот направо в течении указанного в времени(в миллисекундах).
void mycarduino.turnleft (время)
Тоже самое налево.
Int mycarduino.proximity ()
Возвращает значение с датчика в сантиметрах
Примеры:
Перейдите по адресу File -> Examples -> Carduino -> [имя на ваш вкус]
Blink — CARduino секунду двигается вперед, на секунду останавливается, секунду движется вперёд, и т.д.
Object Avoid — CARduino постоянно движется вперед, пока объект находится на расстоянии более 25 сантиметров. Затем он случайным образом выбирает сторону и поворачивает в неё на 800 или 2300 миллисекунд.
Cautious Driving – работает как предыдущая программа, но замечая объект на расстоянии 40 см замедляет скорость.
Вы полностью закончили проект!
Ниже видео робота в действии (из-за проблем с дальномером он отключен, но робот работал)
Прикрепленные файлы:
- Carduino.zip (3 Кб)