

В этой статье подробно описано создание четвероногого робота (робот называется FIER). При конструировании робота я постарался получить максимальную отдачу от затраченных средств.
Бальзовое дерево используется для робота по причине его малого веса. Для удешевления робота мне пришлось использовать самые дешевые сервоприводы, которых нужно много. Они имеют низкий крутящий момент и не могут справиться с большим весом. Также работать с пробковым деревом очень легко.
Необходимые материалы для конструирования робота
Я создал список необходимых для постройки робота материалов в Excel. Общая стоимость компонентов для робота чуть больше $ 100 без доставки. Некоторые материалы можно купить в ближайшем магазине, а некоторые придётся искать или заказывать.
Можно обойтись без батареи, потому что она довольно дорогая и требует зарядного устройства. Можно просто подвести к роботу длинный кабель от источника 5-6В, т.к. робот не будет ходить очень далеко и очень быстро. Также можно добавить акселерометр, чтобы робот мог балансировать, но добавление акселерометра может стать проблемой, если нет опыта в программировании.
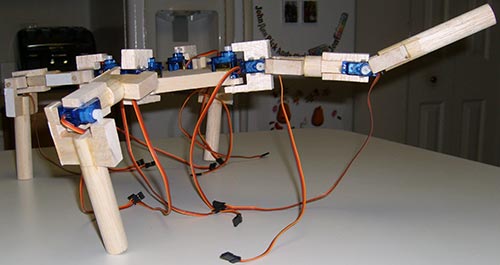
Тело робота
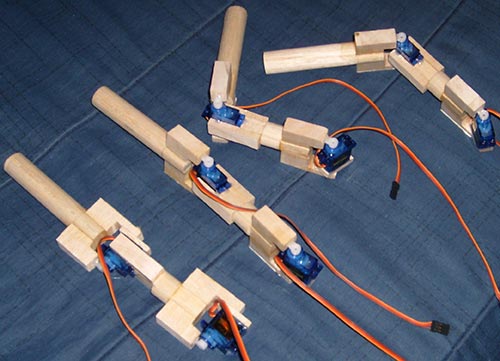
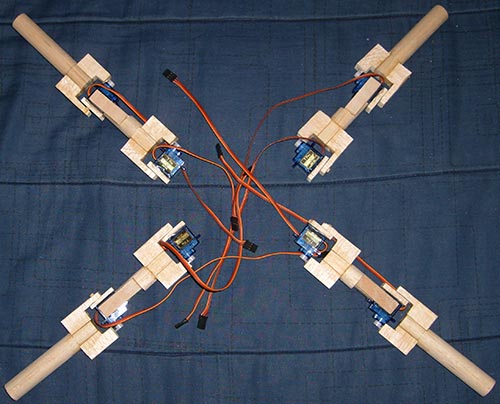
Самая трудная часть этого проекта — это изготовление четырёх ног. Если вы сумели сделать одну ногу, то сможете сделать и остальные. Я не буду подробно описывать все части робота, но я постараюсь дать вам общее представление о них.

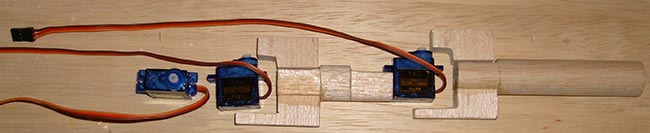
Как упоминалось ранее, корпус выполнен из бальзового дерева, которое очень легко обрабатывать. Для этого нужен лишь нож. Я использовал отрезной станок со столом для более точных и аккуратных резов. Если вы тоже будете использовать отрезной станок со столом, то будьте осторожны и используйте защитные очки.

Чтобы упростить построение ног я сделал чертёж и фотографии необходимых деталей. Сервоприводы крепятся при помощи небольших кусочков дерева со штырьками. Они укрепляют ноги и убирают нагрузку с серво оси. Для их изготовления вам понадобятся свёрла и дюбели. Что касается тела робота, то это просто прямоугольник с мостами для сервоприводов.
Я использовал столярный клей для склеивания частей. Также вы можете покрыть столярным клеем всё тело робота для укрепления. Я использовал термоклей для крепления сервоприводов, но вы можете использовать другой более надёжный клей.
Если вы можете сделать внешний вид или тела робота лучше, то делайте. Я сделал его таким, чтобы он мог поворачивать ногу на 180 градусов и ходить вверх ногами.


На этом видео показано испытание одной ноги.
На этом видео показана нарезка деталей для ноги.
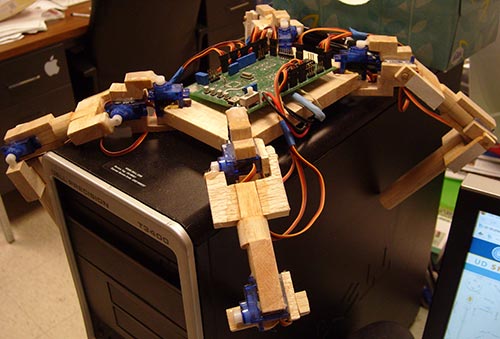
Схема робота
При разработке схемы в неё было заложено много различных функций, но я переработал её для даного робота. Я рекомендую добавить к ней акселерометр, он очень поможет роботу при балансировке.
В схеме есть источник напряжения 5-6В. Он питает все сервоприводы. Их много и они потребляют достаточно большой ток. Используйте источник питания с током 1А и выше. Не используйте источник питания Arduino для питания сервоприводов, питайте им лишь драйвер двигателей.
Для сборки схемы можно использовать печатную или макетную плату.

Программа
Как первую тестовую программу можно использовать программу показанную на видео внизу статьи. Если все работает правильно, робот должен встать, поднять одну ногу и двигать её. Для работы кода необходимо установить драйвер TLC5940, который есть на этом сайте.
Вы может столкнуться с тем, что ноги двигаются в противоположных направлениях. Самый простой способ решения этой проблемы — это изменение кода. В коде есть несколько строк tlc_setServo (4, 100). Первая цифра это номер двигателя, а вторая — это угол поворота сервопривода. Просто изменяйте второй параметр до достижения необходимого результата.
Я предлагаю вам добавить акселерометр для улучшения балансировки робота, у меня не было времени добавления этой функции. Есть пример кода для работы с акселерометром.
Заключение
Я желаю удачи всем, кто собирает этого робота. Его можно улучшить, добавив к нему дальномеры, видеокамеры и другие вещи.
На видео снят первый запуск робота
Прикрепленные файлы:
- FIER_Wave.rar (9 Кб)