
Сопряжение цифровых и аналоговых устройств и вопросы организации питания цифровых схем
Введение
В первой части
этого цикла статей было указано, что вcе цифровые устройства работают лишь с
двумя уровнями напряжений, называемыми логическими уровнями, лог. 0 и 1. Т.е.
на входах-выходах цифровых схем присутствуют лишь прямоугольные импульсы с
практически вертикальными переходами от Uлог0 к Uлог1 и наоборот. Все остальные
напряжения не считаются рабочими и их появление на входах цифровых узлов приводит
к нестабильной работе, либо, в редких случаях, к выходу из строя. Если какое-то
«неправильное» напряжение появляется на цифровом выходе, то это свидетельствует
о его перегрузке или выходе из строя.
ВНИМАНИЕ! Речь не идёт о ситуации, когда на выходе присутствуют импульсы какой-то частоты, а измерения проводятся обычным вольтметром/мультиметром, который не успевает показать эти импульсы и показывает некое «усреднённое» значение напряжения.
В то же время, существует очень много схем и узлов, работающих с аналоговыми сигналами, в которых нет никаких логических уровней и любое напряжение (в каких-то пределах) является допустимым.
Кроме того, в
цифровых узлах «действующей» величиной является лишь напряжение, ток
(естественно, находящийся в допустимых пределах) не влияет на состояние таких
схем.
При необходимости
сопряжения аналоговых и цифровых (чаще всего микропроцессорных) схем приходится
решать вопросы конвертирования аналоговых сигналов в цифровые. Сюда относятся
все аспекты согласования:
— преобразование
напряжений из аналоговой формы в цифровую и наоборот;
—
преобразование тока в напряжение (и наоборот);
— защита цифровых
входов/выходов от различного рода перегрузок;
— подключение
мощных нагрузок (реле, электродвигатели, …) к маломощным выходам цифровых схем;
— и т.д. и
т.п.
В этой части
будут рассмотрены основные способы таких согласований. Следует отметить, что эти
вопросы очень обширны и порой очень сложны, на эту тему существует немало
специализированной литературы и различных статей. Потому мы опишем лишь
основные способы решения этих задач.
5.1
Цифро-аналоговое преобразование напряжения
Одной из
основных задач согласования является получение аналогового напряжения из
цифрового. Это часто требуется делать как само по себе, так и для решения
других задач, например, при построении АЦП – см. ниже.
К примеру, любая
звуковая карта в любом компьютере формирует звук (аналоговый сигнал) из потока
цифровых данных, которые посылает в неё центральный процессор.
Для получения
аналогового напряжения из цифрового кода используется цифро-аналоговый
преобразователь – ЦАП (англ. Digital-To-Analog-Converter, DAC) – [1].
Существует
несколько способов построения ЦАП, мы рассмотрим два наиболее распространённых.
ШИМ.
Это аббревиатура от термина «широтно-импульсная модуляция». Этот способ основан
на пропускании обычных цифровых прямоугольных импульсов через интегрирующую RC-цепочку
(фильтр) – рис. 1.

Рис. 1. RC цепочка
для ШИМ
Управляя
скважностью импульсов, подаваемых на вход, можно получать разные напряжения на
выходе. Принцип работы основан на том, что когда на вход поступает лог.1,
конденсатор начинает заряжаться. При появлении на входе лог. 0 он разряжается
через резистор R и управляющий лог. выход. Результирующее напряжение напрямую
зависит от скважности импульсов на входе. Чем ближе она к единице, тем больше
напряжение на выходе наоборот.
На выход этой
схемы часто подключают повторитель на операционном усилителе, чтобы
предотвратить разряд конденсатора через нагрузку. Также можно включать
несколько RC цепочек последовательно.
ШИМ очень
часто применяется в различных системах управления, существуют даже конструкции,
способные проигрывать на ШИМе 8-битные WAV файлы с малой частотой
дискретизации. Распространению этого способа также способствует то
обстоятельство, что многие микроконтроллеры содержат в себе аппаратные средства
получения импульсов с легкоуправляемой скважностью. См., например, [3].
Схема на базе ШИМ
проста, дешева, легко реализуема, но обладает одним существенным недостатком –
она слишком медленная. Конденсатор, входящий в её состав, должен быть
достаточно большой ёмкости, чтобы не пропустить на выход входные прямоугольные импульсы
(т.е. успеть их сгладить), но с другой стороны, большая ёмкость не позволит сформировать
сигналы большой частоты без потерь амплитуды – конденсатор просто не успеет заряжаться-разряжаться
с требуемой скоростью. Как результат – в погоне за частотой мы неизбежно получим
искажённый сигнал.
Кроме того, с
течением времени ёмкость конденсатора меняется (старение материалов) и,
поэтому, параметры и точность RC цепочки (и, как следствие, всего ЦАПа) неизбежно
изменятся.
Сферы
применения – в основном там, где не нужны высокая точность и скорость – системы
управления двигателями (например, скоростью вращения вентиляторов), получение
программно управляемых источников напряжения (в блоках питания) и пр.
R-2R ЦАП.
Его также называют ЦАПом лестничного типа. Он представляет собой матрицу
резисторов 2-х номиналов – R и 2R – рис. 2.
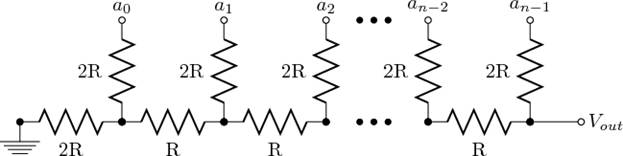
Рис. 2. R-2R ЦАП
Эта схема представляет собой, грубо говоря, набор делителей напряжения. Разные двоичные коды на входах приводят к появлению на выходе напряжения, прямопропорционального поданному коду. Схема очень чувствительна к сопротивлению нагрузки (напряжение выхода «проседает»), поэтому на её выход часто ставят повторитель на ОУ (у которых, как известно, очень большое входное сопротивление).
Такой ЦАП работает с параллельным кодом, его просто подключают к обычным цифровым выходам микроконтроллеров – [5] или любых цифровых схем. Формировать специальным образом какие-либо импульсы на входах (как в случае с ШИМ) здесь не нужно. Корректное выходное напряжение устанавливается на выходе практически мгновенно, т.к. в схеме нет никаких конденсаторов.
Точность
формирования выходного напряжения напрямую зависит от номиналов резисторов –
чем точнее они, тем точнее будет полученный ЦАП. Потому для сборки таких схем
рекомендуется применять резисторы с наивысшим классом точности (0.5%), а в ряде
случаев следует осуществлять отбор – проверять резисторы омметром и
использовать наиболее точные. В промышленно выпускаемых ЦАП-ах интегрального
исполнения (например, отечественная микросхема К572ПА1) используют лазерную
подгонку резисторов матрицы, что обеспечивает высокую точность изделия.
На заре
развития персональных компьютеров, когда звуковые карты были очень дорогими и
очень дефицитными, для проигрывания музыки широко использовались т.н. Covox-ы –
[5], подключаемые к LPT порту компьютера. Они же применялись и на более ранних
компьютерах типа ZX Spectrum, БК-ххх и пр. Это устройство – не что иное, как
самый обычный R-2R ЦАП, к выходу которого иногда подключались различные фильтры
и усилители.
У схемы на
рис. 2 есть недостаток – напряжение на выходе зависит не лишь от резисторов
матрицы, но и от конкретных напряжений на входах. Так, если на одном входе
будет +4.8в, а на другом +3.5в, это приведёт к формированию неверного
напряжения на выходе R-2R матрицы, несмотря на то, что для цифровой схемы,
которая управляет ЦАПом эти напряжения равнозначны (лог. 1).
ЦАП с
матрицей весовых резисторов (перемножающий ЦАП) – рис. 3.
Рис. 3. ЦАП с подачей опорного напряжения
Кроме
управляющих цифровых входов, здесь есть ещё вход опорного напряжеияпряжения Uвх. При включении разрядов через
соответствующие резисторы протекают так называемые весовые токи, преобразуемые
операционным усилителем в напряжение. На выходе ЦАП формируется диапазон
напряжений 0..Uвх. Входные сигналы напрямую не участвуют в формировании
выходных токов или напряжений, они лишь управляют аналоговыми ключами Si. Потому
от конкретных напряжений на входах мало что зависит.
У этой схемы
есть 2 существенных недостатка:
1. Разный
потребляемый ток от источника опорного напряжения при разных входных кодах, что
предъявляет к нему повышенные требования по мощности и стабильности напряжения.
2. При большой
разрядности ЦАПа (и кол-ве резисторов) номиналы резисторов имеют большой
разброс, что сильно затрудняет реализацию схемы в интегральных исполнениях.
Потому применяется
не такая схема, а её модификация – рис. 4.
Рис. 4.
Здесь мы видим
уже привычную и значительно более простую в реализации R-2R матрицу.
Более подробно
– см. [8].
Именно по
такой схеме строятся все ЦАПы интегрального исполнения.
R-2R схемы ЦАП
гораздо точнее и быстрее ШИМа, используется повсеместно в сигнальных (в т.ч. и
звуковых) процессорах, аналого-цифровых преобразователях и т.д. Кроме того, ею
заметно легче управлять.
Цифро-аналоговое
преобразование неизбежно несёт в себе ряд ошибок и погрешностей. Основные из
них – смещение нуля и нелинейность (дифференциальная и интегральная). Более
подробно – см. [9].
5.2 Аналого-цифровое
преобразование напряжения
Для того,
чтобы можно было обрабатывать аналоговый сигнал цифровыми методами (например, в
микроконтроллере), его необходимо сначала оцифровать, т.е. перевести из
аналоговой формы в цифровую.
Эта задача
решается аналого-цифровыми преобразователями (АЦП, по англ. –
Analog-to-Digital-Converter – ADC) устройствами, преобразующими аналоговое
напряжение на входе в цифровой код, прямопропорциональный входному напряжению.
Существует
несколько архитектур АЦП, кроме того есть несколько схем, которые по ряду
признаков могут считаться АЦП в некотором приближении.
Рассмотрим
устройство некоторых видов АЦП.
Триггер Шмитта.
Он подробно описывался в конце 1-й части. В каком-то смысле он может считаться
АЦП, т.к. преобразует аналоговый сигнал в цифровой, однако он совершенно не
приспособлен для задачи преобразования сигналов. 2 важных параметра,
описывающих поведение триггера Шмитта – порог срабатывания и величина
гистерезиса – фиксированы при изготовлении тех или иных серий микросхем и
изменить их сложно либо вовсе невозможно. Потому как АЦП эти устройства
никогда не применяются.
Компаратор
напряжения. Узел, имеющий 2 аналоговых входа и один цифровой – рис. 5. Его
иногда называют одноразрядным АЦП
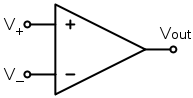
Рис. 5. Компаратор
напряжений
Как видно,
обозначается он также, как и ОУ, но работает он совершенно иначе – рис. 6.

Рис. 6. Зависимость Uвых
от Uвх для компаратора
Применительно
к рис. 5, на выходе появляется лог. 1, когда напряжение на входе V+ больше
напряжения на входе V-, и лог. 0 – наоборот – V+ < V-. Напряжение V- часто
называют опорным, а V+ входным и говорят, что компаратор сравнивает входное
напряжение с опорным.
Компараторы
часто производят с выходом ОК и ОЭ (иногда с обоими – К554СА3), что облегчает их
стыковку с другими узлами схемы.
Компараторы –
устройства очень чувствительные, сами по себе, «в чистом виде» реагируют на
единичные милливольты отличия между входами. С одной стороны это очень хорошо,
т.к. позволяет схеме чётко реагировать на малейшие изменения входного сигнала,
но на практике от этого часто больше вреда чем пользы – если во входном сигнале
«проскочит» малейшая помеха, это вызовет множественные переключения компаратора
со всеми вытекающими последствиями.
Потому в
подавляющем большинстве случаев используют компараторы с гистерезисом (зоной
нечувствительности) – рис. 7.
а)
б)
Рис. 7. Компаратор с
гистерезисом (а) и временная диаграмма его работы (б)
Из рис. 7-б
видно, что компаратор с гистерезисом не переключается, пока Uвх находится между
Uп1 и Uп2. Uоп также лежит между ними, но петля гистерезиса бывает
несимметрична относительно него. Основная цель введения гистерезиса – слегка
ухудшить чувствительность компаратора.
Более подробно
– см. специализированные материалы, например, [6].
Существуют
также 2-хпороговые компараторы (определяют, находится ли входное напряжение
между 2-мя опорными) – рис. 8.
Рис. 8. Двухпороговый
компаратор и временная диаграмма его работы
Такие
компараторы выпускаются промышленно, но их можно сделать и из 2-х обычных.
Входное
сопротивление компараторов очень велико, т.к. они строятся на основе обычных
операционных усилителей.
Рассмотри
теперь собственно сам АЦП – аналого-цифровой преобразователь. Английское
название – ADC (Analog-to-Digital Converter). Выполняет преобразование входного
аналогового напряжение в многоразрядный цифровой код.r
Существует несколько
подходов к построению АЦП – [7], мы рассмотрим наиболее распространённый АЦП
последовательного приближения – рис. 9.
Рис. 9. Структурная
схема АЦП последовательного приближения.
Узлы АЦП на
рис. 9:
K – компаратор
напряжения;
ГТИ –
генератор тактовых импульсов;
CT2 – n-разрядный
двоичный счётчик;
ЦАП –
цифро-аналоговый преобразователь.
Работает такой
АЦП следующим образом:
При подаче
сигнала «Пуск» схема управления обнуляет счётчик CT2 и разрешает ему работать.
После этого он начинает счёт тактовых импульсов, поступающих от ГТИ. Каждое
значение со счётчика преобразовывается ЦАП-ом в напряжение обратной связи Uос, подаваемое
на компаратор. Если Uвх>Uос, то компаратор выдаёт лог. 1, разрешая счётчику
считать дальше. Когда Uос станет равным (либо большим) Uвх, на выходе
компаратора появится 0, счётчик остановится и выдаст сигнал готовности. При
этом значение счётчика будет прямопропорционально напряжению Uвх.
Следует
отметить, что Uвх должно лежать в районе 0..Uоп.
По полученному
коду можно рассчитать напряжение на входе:  , где ADC – код, выданный АЦП, n – разрядность
, где ADC – код, выданный АЦП, n – разрядность
АЦП, VREF- напряжение
опоры (Uоп на рис. 9).
Это – формула
для идеального АЦП, в реальности могут быть некоторые отличия либо дополнения,
учитывающие те или иные особенности АЦП. Так, если в документации к АЦП
указано, что ошибка преобразования составляет 0.5МЗР (младший значащий разряд),
то это значит, что он с вероятностью 50% будет неправильным. Т.е. после
получения значения ADC, его младший бит лучше обнулить и т.п.
Недостаток
такого АЦП – относительно медленное преобразование. Это может привести ещё и к
дополнительным погрешностям преобразования, т.к. входной сигнал может
измениться за то время, пока идёт преобразование (работает внутренний счётчик
АЦП). Для преодоления этого недостатка на вход АЦП ставят специальную схему –
т.н. УВЗ (устройство выборки-запоминания). Ещё одно название этой схемы – УВХ
(устройство выборки-хранения). Его цель – запомнить мгновенное значение входного
напряжения на момент начала преобразования. Мы не будем рассматривать эти
схемы, отметим лишь, что они строятся на базе конденсатора, управляющих
транзисторов и ОУ, которые сначала заряжают конденсатор до уровня входного
напряжения, а далее отключают его от этого входного сигнала. И лишь после
этого запускается собственно АЦП, измеряющий напряжение на конденсаторе.
Наличие УВЗ приводит к некоторой задержке измерения (преобразования), но зато позволяет
повысить точность за счёт гарантированно неизменного сигнала на входе АЦП в
процессе измерения.
Промышленно
выпускаемые АЦП, а также АЦП, входящие в состав различных микроконтроллеров очень
часто содержат в себе УВЗ изначально, поэтому делать его самостоятельно для них
не требуется. По этой же причине УВЗ упоминаются очень редко.
Любой АЦП сам
по себе способен измерять лишь один сигнал. Многоканальные АЦП строятся 2-мя
способами:
1. Установка нужного количества одиночных АЦП с дальнейшим
мультиплексированием их цифровых выходов.
2. Одиночный АЦП с аналоговым мультиплексором на входе.
Первое решение
более дорогое, т.к. по определению содержит слишь АЦП, сколько сигналов надо обрабатывать.
Существенный плюс такого подхода – входные сигналы обрабатываются строго
одновременно. Задержки обработки в них связаны лишь с быстродействием самих АЦП
и управляющих схем, но это уже задержки куда более мизерные по сравнению со
временем преобразования.
Второй способ
гораздо более прост и дёшев, т.к. содержит лишь один АЦП. Недостаток в том,
что в этом случае в каждый момент времени может быть измерен лишь один
входной сигнал. Т.к. сигналы измеряются по очереди, то одновременно измерить их
все невозможно. Именно по такой схеме строятся многоканальные АЦП во всех
микроконтроллерах.
Дифференциальный
АЦП имеет 2 входа и измеряет разность напряжений между ними.
Входное
сопротивление АЦП очень велико, т.к. на входе стоит компаратор. Кроме того, многие
АЦП имеют на входе ещё и дополнительный повторитель на ОУ.
АЦП присущи те
же погрешности, которые свойственны и ЦАПам. Мы не будем описывать эти аспекты.
В завершение
рассмотрим общие вопросы нормализации сигналов и защиту входов АЦП (и
компараторов) от «недопустимых» сигналов.
АЦП не могут
измерять «какое попало» напряжение, его параметры (величина, полярность,
частота и пр.) должны находиться в каких-то границах, оговоренных в
документации на используемый АЦП. Кроме того, в измеряемом сигнале могут
присутствовать различного рода помехи, которые перед подачей сигнала на АЦП
следует отфильтровать (обычными НЧ, ВЧ фильтрами).
Нормализация –
приведение параметров исходного сигнала к допустимым для АЦП диапазонам.
Вопросы
фильтрации выходят за рамки этого описания, рассмотрим лишь способы нормализации
и защиты входов АЦП.
Нормализация
Если
преобразовывается какое-то постоянное напряжение, то нормализация сводится к
его простому уменьшению (обычный резистивный делитель) либо увеличению (на
входе ставится усилитель).
Если входное
напряжение имеет знак противоположный тому, с которым работает АЦП, то его
необходимо проинвертировать – пропустить через инвертор – инвертирующий
усилитель с коэффициентом усиления, равным 1 – рис. 10 (при R1=Rос).
Рис. 10. Инвертирующий
усилитель
Если
преобразовывается переменное напряжение, то ситуация усложняется тем, что оно
знако-переменное, его полярность меняется с определённой частотой. Но АЦП сами
по себе чаще всего работают с положительными сигналами (за исключением каких-то
специализированных моделей), то необходимо решать, куда «девать» отрицательную
полуволну напряжения. Тут возможны 3 варианта – рис 11.
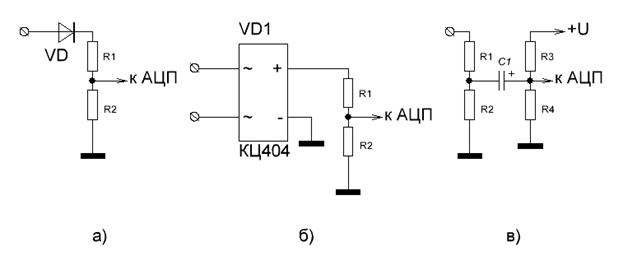
Рис. 11.
На рис. 11:
а) Обычный
диод – однополупериодный выпрямитель. Отрицательная полуволна блокируется
диодом и не пропускается в АЦП.
б) Выпрямитель
(диодный мост). В АЦП попадают обе полуволны, но они уже все положительные.
в) Входной
сигнал «поднимается» на некоторую величину, задаваемую напряжением +U и
делителем R3/R4. Форма напряжения при этом никак не меняется. Также можно
воспользоваться формирователем средней точки (виртуальной земли) на ОУ. Этот
способ единственный, не искажающий форму входного сигнала. Применяется очень
часто для построения прецизионных измерителей, например, цифровых
осциллографов.
Делитель R1/R2
на всех трёх схемах предназначен для регулировки уровня входного напряжения. Во
многих случаях удобнее применять потенциометры (для большей точности
многооборотные) либо сочетание обычных резисторов и потенциометра.
Какой из 3-х
предложенные вариантов выбирать – зависит от конкретной задачи.
Так, например,
в цифровых вольтметрах переменного тока часто применяют самый простой вариант
а), т.к. отсутствие одной полуволны на показания практически не влияет, а
возможные отклонения компенсируются калибровкой. Но если стоит задача по
разработке входного каскада осциллографа, то тут уже пригоден лишь вариант
в), т.к. он не искажает форму входного сигнала. Вариант б) используется в
основном в различных телефонных приставках (АОНы, автоответчики и пр.).
Защита
входов АЦП
При разработке
многих устройств, особенно измерительных, следует учитывать тот факт, что даже
корректно нормализованный сигнал иногда может выйти за допустимые границы. За
примером далеко ходить не нужно – даже обычное сетевое напряжение крайне редко
равно своему номинальному значению 220в (амплитуда 308-310в). Оно бывает
завышенным, заниженным, также случаются кратковременные броски – всплески,
провалы, вызванные некими объективными причинами (например, сосед включил
сварочный аппарат).
Т.к. делители,
диоды и мосты – элементы линейные (в том плане, что они никак не ограничивают
проходящий через них сигнал), то на вход АЦП может попасть напряжение,
выходящее за допустимые границы и вывести его из строя. Чтобы этого не
происходило, применяют защиту от перенапряжения – рис. 12.
Рис. 12. Защита входа
АЦП от перенапряжения
Это – обычный
диодный ограничитель напряжения. U – напряжение, которым необходимо ограничить
сигнал, VD1 и VD2 – ограничивающие диоды, R – резистор, защищающий диоды от
большого входного тока. R, по сути, является входным сопротивлением узла, когда
открыт один из диодов.
Узел работает
следующим образом:
Когда сигнал в
норме, диоды закрыты и он беспрепятственно проходит на вход АЦП. Т.к. входное
сопротивление АЦП очень велико, то входной ток очень мал, падения напряжения на
резисторе нет, следовательно он практически не оказывает влияния на входной
сигнал.
Если
напряжение по какой-то причине станет отрицательным, то откроется нижний диод VD2,
входной ток через него уйдёт в землю, а на входе АЦП будет Uд – напряжение
открытого диода, а оно всегда положительное и достаточно маленькое.
Если Uвх
окажется больше U, то откроется верхний диод и на входе АЦП будет Uацп= U-Uд.
Вместо земли
на диод VD2 можно подавать какое-то напряжение U1, меньшее U. В этом случае
нижний предел будет равен U1+Uд.
В общем случае
необходимо выбирать U=Uпит АЦП, диоды Шоттки (у них наименьшее Uд), резистор R порядка
100к-1М.
Для защиты АЦП
в высоковольтных цепях следует применять специальные защитные диоды –
супрессоры (TVS, трансилы) – [10].
5.3 Преобразования
тока
Аналого-цифровое
преобразование
Токовые
сигналы в цифровые схемы ввести непосредственно невозможно, т.к. (как
говорилось выше) цифровые входы реагируют лишь на напряжение. Более того,
цифровые входы могут выйти из строя при попадании на них недопустимо большого
тока, даже если напряжение при этом находится в допустимых пределах. Потому используется
преобразование тока в напряжение, оцифровка его обычными АЦП, после чего
следует программный пересчёт в ток.
Для преобразования
тока в напряжение существует несколько способов, используемых в зависимости от специфики
задачи. Для такого преобразования можно использовать:
шунты) – рис. 13-а;
на ОУ – рис. 13-б.
а)
б)
Рис. 13. Шунт и
преобразователь «ток-напряжение» на ОУ
Шунт работает
просто – протекающий ток Iн создаёт на резисторе напряжение Uш,
пропорциональное этому току. Uш подаётся на АЦП, измеряется им. Затем, зная Rш,
по закону Ома вычисляется искомый ток: Iн=Uш/Rш.
Преимущества:
схемы, т.к. у резисторов нет индуктивных и ёмкостных составляющих.
Недостатки:
1. Вносит искажения в измеряемую цепь. Схема, работающая через шунт, всегда
«недополучает» напряжение Uш. Иногда это очень критично.
2. Трудность выбора значения шунта. С одной стороны он должен быть как
можно меньшим (Rш->0), чтобы вносить в измеряемую цепь как можно меньшую погрешность,
с другой слишком малое Rш даст слишком малое Uш, которое, во-первых сложно
измерить, а во-вторых, оно может оказаться слишком зашумлено.
3. При большом токе шунтовые резисторы сильно нагреваются. Нагрев приводит
к изменению его сопротивления, а это неизбежно влечёт ошибки измерения. Кроме
того, вследствие перегрева шунт может перегореть, тогда нагрузки потечёт через
входные каскады измеряющей схемы и может вызвать их выход из строя.
Схемы на базе
шунта используются, в основном, в различных цифровых амперметрах.
В схемах с
шунтами также часто применяются специальные дифференциальные (инструментальные)
усилители, но это здесь рассматриваться не будет, см. специализированные
материалы.
Преобразователь
«ток-напряжение» (рис. 13-б) даёт на выходе напряжение, пропорциональное входному
току. Т.е., как и для шунта Uвых=Iвх*R1. Основные достоинства – большое входное
сопротивление и не нужен диф. усилитель.
Такие
преобразователи используются, например, в схемах ввода сигналов датчиков,
имеющих токовый выход. К примеру – датчик освещённости на фотодиоде – рис. 14.
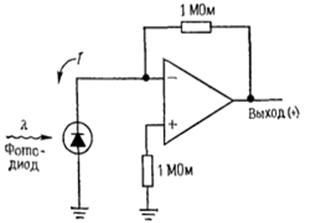
Рис. 14. Датчик
освещённости на фотодиоде
Принцип работы
прост – при изменении освещённости фотодиода ток через него меняется,
соответственно меняется и напряжение на выходе всего узла, а значит, его уже
можно подключать к АЦП.
Общий
недостаток таких схем – отсутствие гальванической развязки. Т.е. измеряющая и исследуемая
схемы электрически связаны, по сути они становятся одной схемой. И, если вдруг на
входе появится ток, превышающий максимально допустимое значение для данного
узла, то он может сгореть сам и, возможно, «утащить за собой» всю остальную
схему либо какие-то её части. Этот недостаток устраняется использованием
гальванической развязки – раздел 5.4.
Цифро-аналоговое
преобразование тока
Заключается в генерации
тока с помощью различных устройств цифрового управления.
Подобные
устройства часто строятся на базе обычного ЦАП и преобразователя
напряжение-ток, например, на базе ОУ. Здесь мы не будет это рассматривать, т.к.
подобные задачи весьма специфичны и встречаются достаточно редко.
5.4 Гальваническая
развязка
Основная цель введения гальванической развязки – устранение непосредственной электрической связи между схемами либо частями одной схемы. При этом части, разделённые гальванической развязкой становятся электрически независимыми, поэтому ток никогда непосредственно не проходит из одной части схемы в другую.
Гальваническую
развязку всегда желательно использовать при подключении каких-либо устройств к
электро- и телефонным сетям, а также радиоточке. Также, если устройство предполагает
подключение к ПК, то развязка строго обязательна. Если она отсутствует, то
устройство и сам ПК выйдут из строя.
Существует 2
основных вида гальванической развязки – оптическая и на основе различных
индукционных эффектов. Рассмотрим их.
Оптическая
развязка
Заключается в
установке между развязываемыми схемами специального узла – оптрона (оптопары) –
рис. 15.
Рис. 15. Пример
оптопары
Как видно из
рис. 15, оптопара состоит из 2-х электрически несвязанных частей – светодиода
и фототранзистора. Принцип действия прост – при включении светодиода
фототранзистор открывается и начинает пропускать ток подобно обычному
транзистору. При этом ток из цепи светодиода не проникает в цепь транзистора.
Светодиод
называют управляющим элементом, транзистор – исполнительным.
Пример
использования – рис. 16.
Рис. 16. Пример
использования оптопары
На рис. 16
показан пример управления лампой. При подаче управляющего напряжения светодиод
включается, отпирает транзистор, лампа загорается. Видно, что фактически это –
2 независимые схемы. Управляющее напряжение и ток светодиода (задаваемый
резистором R1) никак не связаны с исполнительной частью. Там своё напряжение (Uисп)
и свой ток, задаваемый сопротивлением лампы. Конечно, нужно следить, чтобы он
не превышал допустимого тока коллектора транзистора. Ток нагрузки совершенно не
связан с током светодиода.
Следует
отметить, что существует довольно много разных видов оптопар. В качестве исполнительного
элемента могут выступать: простые транзисторы (как на рис. 15), ющим элементом, составные, фотодиоды, симисторы и
т.д. В зависимости от типа исполнительного элемента получаются оптопары с
разными характеристиками:
1. Если исполнительный элемент – биполярный либо биполярный составной (для
повышения мощности исполнительного узла), то оптопара подобна обычному
электронному ключу на транзисторе (разд. 5.6).
2. Если MOSFETы (полевые транзисторы), то исполнительная часть оптопары
будет нечувствительна к полярности напряжения нагрузки. Этот вид оптопар ещё
называют «электронным» реле.
3. Симистор. Используются для управления мощной нагрузкой переменного тока,
т.к. никакие транзисторные оптопары не могут работать на переменном токе. Более
подробно – см. раздел 5.6.
4. Фотодиод. В отличие от предыдущих типов, оптопары с фотодиодом способны передавать
аналоговые сигналы. Такие оптопары называют линейными. Очень часто они содержат
два фотодиода, один работает как выходной элемент, а второй используется для
организации обратной связи с управляющими схемами (например, ОУ).
Управляющий
элемент всегда один – светодиод.
Развязка
на основе индукционных эффектов
Проще говоря
это различные трансформаторы (напряжения и тока), датчики на основе эффекта
Холла и т.п.
Действие всех
этих устройств основано на появлении (либо изменении) тока в проводнике при
помещении его в магнитное поле другого проводника.
Мы не будем
здесь описывать все эти вещи. Принцип измерения переменных тока и напряжения с
помощью трансформаторов с практической реализацией на АЦП и микроконтроллере подробно
описан в [11].
Описание
эффекта Холла и датчиков на его основе – см., например, [12].
5.5 Цифровые
сигналы
Ввод и вывод
цифровых сигналов в цифровые устройства, как ни парадоксально это звучит, тоже
могут иметь ряд нюансов. Дело в том, что разные цифровые устройства моут иметь
разные характеристики.
ТТЛ микросхемы
(и совместимые с ними) работают с цифровыми сигналами, широко известный COM-порт
компьютера тоже работает с цифровыми сигналами. И очень распространённые SD/MMC
карты памяти тоже управляются цифровыми сигналами. Но, несмотря на это, если мы
подключим SD карту непосредственно, например, к COM-порту или даже к ТТЛ
микросхеме, то она сгорит в первую же секунду своей работы в таких условиях.
Более того, вместе с нею может сгореть и COM-порт, с которым мы попробуем
совершить подобного рода издевательство. Аналогично сгорит и любая ТТЛ
микросхема, будучи непосредственно подключённой к COM-порту и т.д. и т.п.
Причиной
выхода компонентов из строя во всех этих ситуациях является то, что кроме прямоугольной
формы импульсов огромную роль играют их т.н. количественные параметры, в
частности амплитуда сигнала.
В первой части
уже было немного сказано про разные уровни напряжения на входах/выходах разных
цифровых схем. Рассмотрим более подробно основные аспекты и способы согласования
различных цифровых узлов.
Почти все цифровые
микросхемы, микропроцессоры и микроконтроллеры работают в стандарте ТТЛ,
несмотря на то, что подавляющее их большинство являются КМОП, а не ТТЛ схемами.
Это означает, что напряжение их питания, как правило, составляет Uпит=+4.5в..+5.5в,
а напряжение логических уровней для 0 и 1 равно 0..Uпит/2 и Uпит/2..Uпит
соответственно. Если напряжение на входе схемы окажется больше Uпит, либо
меньше 0, то этот вход (либо какие-то части схемы) может выйти из строя.
Допустимые отклонения конечно есть, но они, как правило, очень малы и не
превышают нескольких десятых вольта. Так, например, для очень распространённых
микроконтроллеров AVR минимально допустимое напряжение лог. 0 составляет -0.5в,
а самое большое напряжение лог. 1 равно Uпит+0.5в, т.е. при Uпит=+5в оно не
может превышать +5.5в. Но даже при таких параметрах не рекомендуется работать,
т.к. при этом схема будет функционировать в неких предельных режимах и может
быстро выйти из строя.
В настоящее
время всё больше различных узлов и микросхем работают при +Uпит= 3.3в (+2.6 ..
3.6в). Лог. уровни соответствующие – лог. 0 вблизи 0в, лог. 1 не более +Uпит.
Вышеупомянутый COM-порт компьютера работает в стандарте RS232, уровни которого составляют -10..-12в (лог.1) и +10..+12в (лог. 0). Как видно, они значительно отличаются по модулю и от ТТЛ уровней и от 3.3 вольтовых схем. Кроме того, они двуполярные и инвертированные (напряжение лог. 1 меньше напряжения лог. 0).
И т.д. и т.п.
Потому при
стыковке узлов (микросхем) между собой необходимо следить за их
входными/выходными напряжениями. Так, даже ТТЛ-овская лог. 1 напряжением +5в может
запросто сжечь +3.3в узел, не говоря уж о COM-порте с его двуполярными и
«высоковольтными» 12в сигналами.
В таких
случаях между ними необходимо ставить специальные согласующие схемы – начиная
от простейших делителей напряжения и диодов — [2] и заканчивая разнообразными
специализированными микросхемами – преобразователями уровней (типа MAX232 для COM-порта).
Но
согласование уровней напряжения требуется не всегда. Если, например, выводы
задокументированы как «5V tolerant» (например, у микроконтроллеров ARM7 фирмы Atmel
– AT91SAM7xxx, имеющих Uпит=3.3в), то это означает, что их можно подключать к
обычным ТТЛ выводам непосредственно, без каких-либо преобразователей уровня.
Т.е. не нужно обращать внимания на то, что 2 разных узла по факту имеют разные
уровни сигналов.
При этом также
всегда необходимо следить за входными/выходными токами схем, чтобы не
перегрузить их. См. также специализированные статьи, например, [16].
5.6 Управление
нагрузкой
Основная цель любого цифрового устройства – управление чем-либо. Объекты, которыми мы можем захотеть управлять, могут быть самыми разными – от маленьких светодиодиков до огромных промышленных электродвигателей и прочего силового оборудования.
Сложность
подключения каких-либо исполнительных узлов к цифровым схемам заключается в
том, что цифровые выходы микросхем маломощны – максимальное напряжение на них всегда
не более Uпит микросхемы, а наиболее типичный ток, который они могут
коммутировать обычно на превышает 10-20мА. Некоторые микросхемы с мощным
выходом (типа ЛА11, ЛА12, ЛА13) выдерживают до 12в при токе 40-60 мА. Но и
этого часто бывает недостаточно.
Кроме того, если
нагрузка содержит в себе мощные индуктивности и/или ёмкости, то в момент
включения/отключения в цепи такой нагрузки возникают броски тока и напряжения,
которые могут быть любого знака и превышать по значению предельные значения для
цифровых выходов, даже если в установившемся режиме все параметры находятся в
допустимых пределах.
Рассмотрим
некоторые основные способы подключения различных нагрузок к цифровым
устройствам.
Светодиоды
и прочие маломощные нагрузки
В своём
большинстве светодиоды – маломощные, низковольтные индикаторные устройства. Их
рабочий ток составляет 5-10мА, а напряжение, достаточное для их открытия (и
включения) примерно 2в. При таких параметрах они практически всегда могут быть
непосредственно подключены к цифровым выходам – рис.17.
Рис 17. Подключение
светодиода для индикации различных уровней на цифровых выходах
Резистор на
схемах призван ограничить ток через светодиод и ножку схемы. Инвертор показан
для примера, на его месте может быть любой цифровой узел.
В случае 17-а светодиод
включится при высоком уровне на выходе. В принципе, в этом случае резистор не
нужен, т.к. внутри любой микросхемы всегда есть некое сопротивление между +Uпит
и выходом (рис. 2 части 1), но это сопротивление не всегда бывает известно.
Потому R1 лучше ставить всегда. Если выход с ОК/ОС, то диод светиться не будет,
т.к. такой выход не является источником сигнала, он пассивен. В этом случае
необходим внешний pull-up резистор.
Случай 17-б
предназначен для индикации лог. 0 на выходе. В этом случае выход схемы
оказывается заземлён открытым выходным транзистором. Т.е. левый по рисунку
вывод резистора R1 фактически сидит на земле схемы – светодиод открыт и
светится.
Наиболее
типичный номинал R1 в обоих случаях – 500 … 1000 Ом в зависимости от
требуемой яркости свечения светодиода.
Таким способом,
в принципе, можно подключать любую маломощную нагрузку.
Из рис. 17 и
рис. 2 части 1 видно, что в любом случае максимальный ток нагрузки будет
ограничен либо мощностью (допустимым током) внутреннего pull-up резистора, либо
максимально допустимым током открытого перехода выходного транзистора. А эти
величины весьма и весьма ограничены. Наиболее типичное значение – 10..20 мА. Для
мощных выходов некоторых микросхем (например, 155 серии) – 50-60 мА.
Следовательно, если мы подключим к цифровому выходу даже обычный динамик
сопротивлением даже 60 ом (это уже считается высокоомным динамиком, а типовое
значение – вообще 8-10 ом) при наиболее типичном напряжении 5в, мы получим ток
почти 83мА, что уже недостижимо для цифровых микросхем. А если нам необходимо
включать более мощную нагрузку, например, 12 вольтовую лампочку или реле, то задача
вообще становится неразрешимой.
Нагрузки
средней мощности
Для
преодоления вышеозначенной проблемы используют узел, называемый электронным
ключом – рис. 18.
Рис. 18. Управление
нагрузкой с помощью электронного ключа
Это обычный
транзистор, работающий в ключевом режиме. Когда на выходе лог. 1, он
открывается и включает нагрузку. При лог. 0 транзистор закрывается, выключая
нагрузку.
Здесь появляется
значительное преимущество – ток и напряжение питания нагрузки могут быть
существенно выше соответствующих параметров управляющего выхода. Резистор R ограничивает
ток базы транзистора и ток выхода лог. элемента. Типичные значения – 500
…10к. Для ТТЛ схем наиболее часто используют 1к. Этого достаточно для
подавляющего большинства транзисторов. Но если управляющая схема низковольтная
– 3.3в и ниже, то необходимо соответствующим образом подбирать и транзистор и
резистор.
Такую же схему
можно собрать и на полевом (MOSFET) транзисторе. Мы не будем это рассматривать.
Индуктивные
нагрузки
Это нагрузки
содержащие в своём составе индуктивности (обмотки, катушки). Чаще всего
встречаются электромеханические реле и электродвигатели.
Особенностью
таких нагрузок является то, что в моменты включения-выключения на индуктивностях
наблюдаются всплески тока и напряжения по значению в несколько превышающие
обычные (номинальные) значения. Кроме того, эти всплески имеют и отрицательный
знак (ток кратковременно течёт в обратном направлении). Если первое
обстоятельство можно преодолеть использованием мощного транзистора с большим
допустимым током коллектора, то отрицательные всплески могут легко вывести из
строя даже очень мощный транзистор.
В этих случаях
используют шунтирующий диод – рис. 19.
Рис. 19. Электронный
ключ с шунтирующим диодом
Схема работает
совершенно также, как и на рис. 18.
Когда реле
включено, диод, будучи включённым в обратном направлении, заперт и никак не
влияет на работу схемы. Но в моменты включения/отключения реле отрицательные
всплески открывают диод и закорачиваются через него, не попадая в транзистор.
Диод – обычный, выпрямительный, должен быть достаточно мощным, чтобы не сгореть
от этих токов. Для 12-вольтовых реле малой и средней мощности вполне достаточно
диода типа 1N4148 (КД522). Если реле помощнее, 24в и более, то желательно
ставить что-то типа 1N4148 (из отечественных – Д226Б).
Нагрузки
переменного тока и гальваническая развязка
Как можно
заметить, все вышеописанные примеры касались нагрузок, работающих на постоянном
токе и «сидящих» на одной земле с управляющей схемой. Но это, к сожалению, возможно
далеко не всегда. К примеру, в системах промышленной автоматики требуется
управлять электроприборами, работающими от сети переменного тока – мощными
электродвигателями, электромагнитами и пр.
Да и в
бытовых приборах можно найти массу примеров – холодильники, стиральные машины и
пр.
Рассмотрим
способы такого управления.
1-й
способ
Заключается в
использовании электро-механические реле – рис. 19. Оно осуществляет
гальваническую развязку (управляющие цепи электрически не связаны с цепями
нагрузки) и позволяет включать-выключать высоковольтные и мощные нагрузки с
помощью относительно малых токов и напряжений.
Но, и
недостатков тоже достаточно:
1. Низкая скорость включения/выключения – не более 10 Гц (и то, это чуть ли
не идеальная цифра для реле).
2. Механические контакты «дребезжат» — см. рис. 27 части 1 статьи.
3. При коммутации даже относительно маломощных нагрузок (типа обычных ламп
накаливания) часто возникает искра. Происходящее при этом очень напоминает
процесс электросварки в миниатюре – контакты окисляются и подгорают, ухудшая электропроводимость
цепи (окислы плохо проводят электрический ток). В конечном итоге возможно либо
полное отсутствие контакта (следствие окисления), либо наоборот, вечнозамкнутая
цепь. Последнее происходит из-за «сваривания» контактов реле, когда они
слипаются и силы упругости самих контактов либо специальной возвращающей пружины
уже не могут вернуть их в исходное состояние. Все эти факторы в той или иной
степени могут повлиять на работоспособность конечного устройства.
4. Замыкающиеся/размыкающиеся контакты реле являются источником довольно
мощных радиопомех и наводок, которые могут нарушить работу цифровых устройств.
Почти все, наверное, слышали, например, щелчки в колонках при включении/выключении
старых холодильников – то самое явление.
2-способ
– тиристоры и симисторы
Потому в
последнее время реле редко используются для управления электрооборудованием. Их
почти повсеместно вытесняют специальные полупроводниковые приборы – тиристоры [14]
и симисторы (триаки) [15] — рис. 20 и пр.
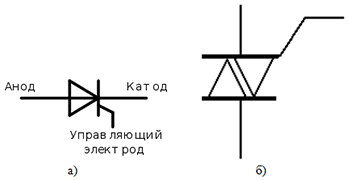
Рис. 20. Тиристор и
симистор
Мы не будем
детально их рассматривать, см. специализированные статьи, отметим лишь, что для
управления мощными нагрузками применяются в основном симисторы, т.к. способны
пропускать переменный ток и могут как включаться, так и выключаться под
действием управляющего сигнала, подобно рассмотренному выше электронному ключу.
Но сами по
себе симисторы не совсем годятся для решения задач управления, т.к. не
обеспечивают гальваническую развязку управляющей и силовой цепей. Потому часто
применяют либо симисторный оптрон, либо его сочетание с внешним симистором –
рис.21 (схема взята из даташита на оптрон MOC3063).
Рис. 21 Управление мощной
нагрузкой через опторазвязку с внешним симистором
Здесь мы видим
полноценную оптическую гальваническую развязку силовой и управляющей частей.
Внешний симистор в подобных схемах можно не ставить, подключая в цепь нагрузки
непосредственно симистор оптрона. Но при этом следует учитывать, что внутренний
симистор оптронов очень часто довольно маломощный (в случае с MOC3063 предельно
допустимый ток – 1А).
При
использовании дополнительного симистора максимальный ток нагрузки определяется
уже не параметрами оптрона, а параметрами внешнего симистора (на рис 17 – ток
нагрузки до 16А).
Цепочка R9C3 на
рис. 21 – RC-снаббер, предназначен для подавления кратковременных импульсных
помех, возникающих при включении/выключении нагрузки. Такие цепочки нередко
применяют и с обычными электромагнитными реле.
5.7 Вопросы
организации питания цифровых устройств
В отличие от
многих аналоговых микросхем (тех же ОУ, например) подавляющее большинство цифровых
микросхем имеют очень узкий диапазон напряжений питания.
Так, например,
очень распространённый ОУ LM358 имеет диапазон допустимых напряжений -16в..+16в
либо 0..+32в, а типовой диапазон питания цифровых микросхем составляет +-0.5в от
номинального значения. К примеру, если микросхема имеет номинальное Uп=+5в, то
допустимый диапазон будет +4.5..+5.5в. Но, следует отметить, что это не всегда
так, допустимые допуски напряжения питания следует уточнять в документации на
ту или иную микросхему.
Эти
обстоятельства повышают требования к источникам питания цифровых схем, которые
должны соответствовать требованиям, предъявляемым микросхемами, используемыми в
устройстве. Потому для питания таких устройств лучше применять БП, собранные
на однокристальных стабилизаторах (типа LM7805, LM317 и т.п.). Использовать БП
других типов можно после проверки их выходного напряжения.
Кроме того, цифровые
схемы довольны чувствительны к разного рода помехам и зашумлённому («грязному»)
питанию. Вывести устройство из строя помехи вряд ли могут, а вот помешать нормальной
работе вполне способны.
Для борьбы с
помехами по питанию применяют следующие методы:
плёночных) конденсаторов 0.1 uF в БП – рис 22. Вообще такие конденсаторы положено
ставить на каждую цифровую микросхему/процессор (непосредственно вблизи их
корпусов). Если схема содержит большое количество простых логических
микросхем типа К155 (либо аналогичных), то в таких случаях устанавливают
один-два конденсатора на каждые 5 микросхем.
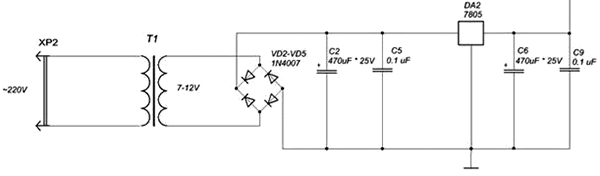
Рис. 22. БП для
5-вольтовых цифровых устройств (взято из [17]).
Дроссели применяются в цепях опорного напряжения ЦАПов и АЦП, а также для
разделения аналогового и цифрового питания.
Рис. 23 Дросель в
цепи питания
Ферритовые
бусины (ferrite bead) – рис. 24. Следует обратить внимание, что на схемах
бусина обозначается также, как и резистор (иногда закрашенный), но это совсем
не резистор, это просто проводок, на который надет маленький кусочек феррита.
Иногда делают один-два витка провода.
Рис. 24 Ферритовая
бусина
См. также
специализированные материалы и статьи.
Ссылки:
1. Википедия – «Цифро-аналоговый
преобразователь».
2. Википедия — ШИМ
3. ШИМ на микроконтроллерах AVR — http://easyelectronics.ru/avr-uchebnyj-kurs-ispolzovanie-shim.html
4. R-2R ЦАП и микроконтроллеры — http://radiohlam.ru/teory/dac_r-2r.htm, http://avrdevices.ru/r-2r-cap-praktitcheskoe-primenenie/
5. Covox
6. Аналоговые компараторы — http://www.gaw.ru/html.cgi/txt/doc/comparator/comp_1.htm
7. АЦП
8. Цифро-аналоговые преобразователи — http://naf-st.ru/articles/digit/dac/
9. Цифро-аналоговые преобразователи — /me/beginner/beginner90.php
10. Супресоры
— http://www.kosmodrom.com.ua/data/smbj.php
11. Многофункциональный
ваттметр с гальванической развязкой — /me/izmer/izmer90.php
12. Датчики
Холла — http://robocraft.ru/blog/electronics/594.html
13. http://robozone.su/info/16-kak-podkljuchit-ustrojjstvo-na-3.3v-k-5.html
14. Тиристоры
15. Симисторы
16. Защита входов цифровой
электроники
17. Ваттметр на МК
Автор: Павел Негробов (hd44780)