
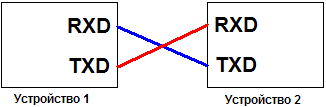
В этом уроке я расскажу про UART интерфейс в микроконтроллерах AVR и про работу с ним в BASCOM-AVR. UART это универсальный асинхронный приёмопередатчик. Сам интерфейс достаточно распространён и имеется практически во всех AVR микроконтроллерах, исключения лишь составляет микроконтроллер Attiny13 и ещё некоторые. Передача данных осуществляется по биту в равные промежутки времени, этот промежуток времени задаётся скоростью в бодах, вот например стандартные скорости: 4800 бод, 9600 бод, 19200 бод, 38400 бод и т.д. Следует также учесть, что скорость должна быть одинаковой с обеих сторон подключения. Кстати приёмник и передатчик работают независимо. Подключение UART осуществляется по трём линиям: RXD – приём, TXD – передача и GND – общий (минус). Подключать UART надо, так сказать «наоборот» RXD к TXD, а TXD к RXD как на картинке ниже:
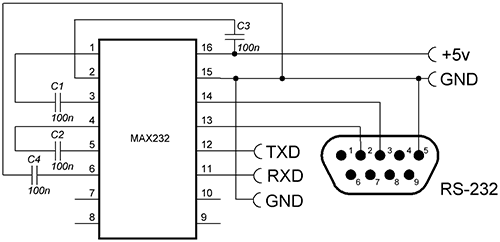
С помощью UART также можно можно связать микроконтроллер и компьютер, но есть одна проблема: у UART интерфейса логические уровни 0 и +5 вольт, а в компьютере логические уровни в интерфейсе RS-232 могут быть от -25 до -3 вольт и от +3 до +25 вольт. Решить эту проблему нам поможет конвертер уровней, его можно собрать на транзисторах, а лучше использовать специальную микросхему MAX232. Вот самая распространенная схема подключения MAX232:
Работа с UART в BASCOM-AVR
Прежде всего, перед началом работы с UART нужно указать скорость в бодах, делается это командой: $baud = (скорость). К примеру: $baud = 9600 .Также не забываем указывать реальную частоту тактового генератора командой $crystal = (скорость Hz), в ином случае скорость работы программы будет не совпадать со скоростью работы микроконтроллера и в итоге приём или передача данных будет неверная. Пример написания команды $crystal на частоту 8МГц: $crystal = 8000000. Кстати, имеет смысл открыть окно настроек в BASCOM-AVR (Options>Compiler>Communications):
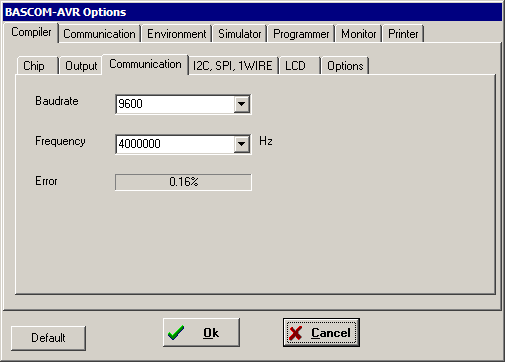
В этом окне настроек вы можете указать скорость работы UART, тактовую частоту тактового генератора и посмотреть процент ошибок при выбранной тактовой частоте. Но лучше указывать скорость и тактовую частоту непосредственно в самой программе. Кстати процент ошибок при тактовой частоте в 4МГц очень мал (0.16%), но все, же есть. Если вы хотите чтобы процент ошибок был нулевой надо подобрать такую тактовую частоту, которая будет кратна скорости работы UART. К примеру, при тактовой частоте 3.6864 МГц и скорости работы UART в 115 200 бод процент ошибок будет нулевым.
И так, после указания тактовой частоты и скорости работы UART можно приступить к работе с самим интерфейсом. Чтобы послать, что-либо в UART есть команда Print (переменная или текст в кавычках), вот пример её использования: Print «Hello, world!». Кроме текста в кавычках можно выводить и переменные, причём сразу несколько разделяя точкой с запитой, например: Print «Weight:» ; a ; «kg» или так Print «Hello,» ; «world!» . Также с UART можно и принять, делается это командой Input (текст или переменная в кавычках для посылки), (переменная, куда записывать полученные данные). Как видим всё очень просто: сначала пишем в кавычках текст, который передастся в UART, а потом указываем переменную, в которую запишутся данные полученные данные из UART. Вот пример: Input «Weight:», a
Работа с UART на практике
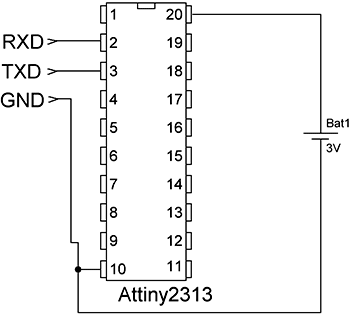
Ну а теперь попробуем «порулить» UART на практике, сначала соберём простую схему:
Потом наберём простую программку, (используя полученные знания) и откомпилируем её. Вот и она:
$crystal = 8000000
$baud = 9600
Dim A As Byte
Print «Hello, world!»
Print «Hello /me»
Input «Size:» , A
Print «Size=» ; A ; «bytes»
End
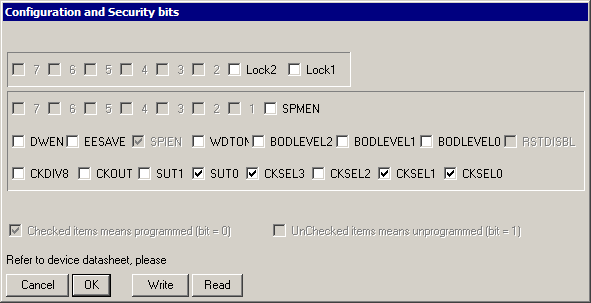
А работать эта программка будет так: сначала будет посылать в UART текст, а потом будет ждать приёма данных (в данном случае числа) которые запишутся в переменную a и позже пошлёт текст вместе с переменой. Для тех, кому лень компилировать, в файлах к уроку есть готовая прошивка. Прошиваем микроконтроллер, подключаем выводы микроконтроллера RXD, TXD (подключаем, как я писал выше) и GND к COM порту компьютера (через конвертер уровней) или к USB (USB – UART переходник), открываем на компьютере программу для работы с COM портами, например: Terminal by Bray, Hyper Terminal или Terminal emulator в BASCOM-AVR, указываем COM порт к которому подключились, указываем скорость в бодах, смотрим в окно программы, подаём питание на микроконтроллер и радуемся. Необходимо также учесть, что после прошивки микроконтроллера необходимо установить фьюз биты на нужную нам тактовую частоту генератора в данном случае (для программки выше) на 8МГц. На 8МГц можно использовать внутренний тактовый генератор микроконтроллера и установить фьюз биты вот так (для PonyProg2000):
В железе:
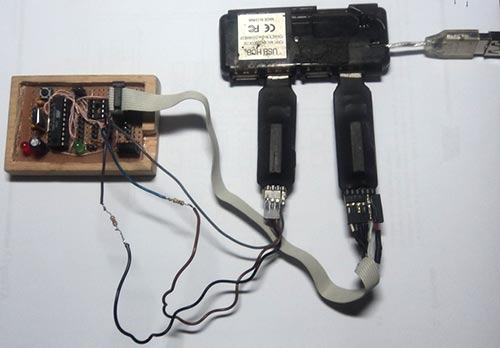
На фотографии у меня плата для программирования Attiny2313, USB-UART переходник и программатор USBtiny. Ниже вы можете посмотреть видео, как это работает
Файлы для урока (проект в Proteus, исходник, прошивка) прилагаются
Урок 11. Работаем с DS1307 микросхемой часов реального времени
Прикрепленные файлы:
- mc129.rar (12 Кб)