
Статья «Обработка сигналов датчиков балансировочной машины» позволяет понять построение электронной схемы по измерению дисбаланса, назначение её радиокомпонентов для обработки исходного сигнала пьезодатчиков балансировочной машины. На фотографии балансировочная машина имеет цифровой выход показателей дисбаланса по каналам, в статье рассматривается упрощённый вариант с указателями дисбаланса на гальванических приборах.

Балансировка вращающих частей машин и механизмов — обязательное условие их безаварийной работы. Отсутствие должной балансировки приводит к раскручиванию крепёжных изделий, как бы крепко они не были закреплены. Это приводит к неизбежным аварийным ситуациям.
На низких оборотах вращения, дисбаланс вращающих частей агрегата незаметен, с повышением оборотов вибрация, как следствие небаланса, увеличивается по амплитуде и непринятие мер приводит к поломке не лишь агрегата, но и механизма в целом.
Дисбаланс во вращающихся лопастях турбины или корабельного винта или турбины (облом куска одной лопасти, попадание инородного материала, поломка подшипника, гидроудар…) приводит к раскачке и поломке агрегата.
Дисбаланс в колесе автомобиля (разная толщина резины покрышки, некачественная резина, повреждения металлического диска…), как правило приводит к аварии с тяжёлыми последствиями.
Балансировку автомобильных колёс авторами проводились многократно в шиномонтажной мастерской, с контрольной проверкой на стенде.
Балансировка, как правило, проводится в 2-х режимах — статическом и динамическом.
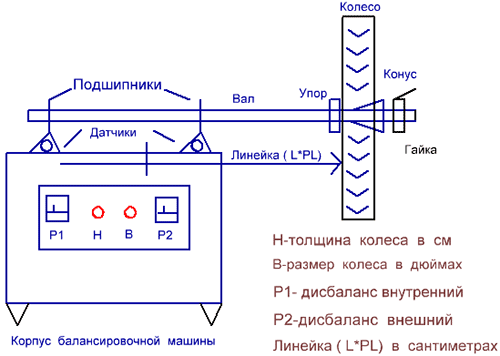
Дисбаланс определяется установкой колеса (или винта корабля) на вал, закреплённый одним или двумя концами на тяжёлую станину. Угловой конус с зажимом позволяют «посадить» испытуемое изделие на вал балансировочной машины, без эксцентрика.
В статическом режиме колесо проворачивается на угол достаточный, чтобы вес дисбаланса установился в нижнем положении — эта часть колеса тяжелее. Для компенсации дисбаланса достаточно закрепить в верхней части колеса свинцовый «грузик», по весу компенсирующий дисбаланс противоположной стороны. Таким методом можно добиться довольно высоких результатов балансировки.
Там где грузики по техническим причинам нет возможности закрепить, снимается металл(на винтах) или резина (на гоночных автомобилях).
Динамический режим балансировки позволяет более качественно устранить небаланс.
В этом режиме определяется точное значение и положение этого дисбаланса на колесе, с раскручиванием внешним электродвигателем вала балансировочной машины через редуктор, до максимальных оборотов. Вращение исследуемого колеса на эксплуатационных оборотах позволяет выявить возможные дефекты дисбаланса с точным масштабированием.
Информация о дисбалансе снимается кварцевыми датчиками, закрепленными на стойках (опорах ) подшипников вала балансировочной машины и далее обрабатывается цифровой или аналоговой схемой с выдачей информации о весе дисбаланса, его положении и угле.
Характеристики прибора:
Напряжение питания +/-15Вольт.
Ток потребления 100 мА
Диаметр колёс 12-15 дюймов.
Вес дисбаланса 10-100 грамм.
Количество каналов 2
Погрешность измерения 10%.
Для понимания условий масштабирования динамической балансировки предложена принципиальная схема:
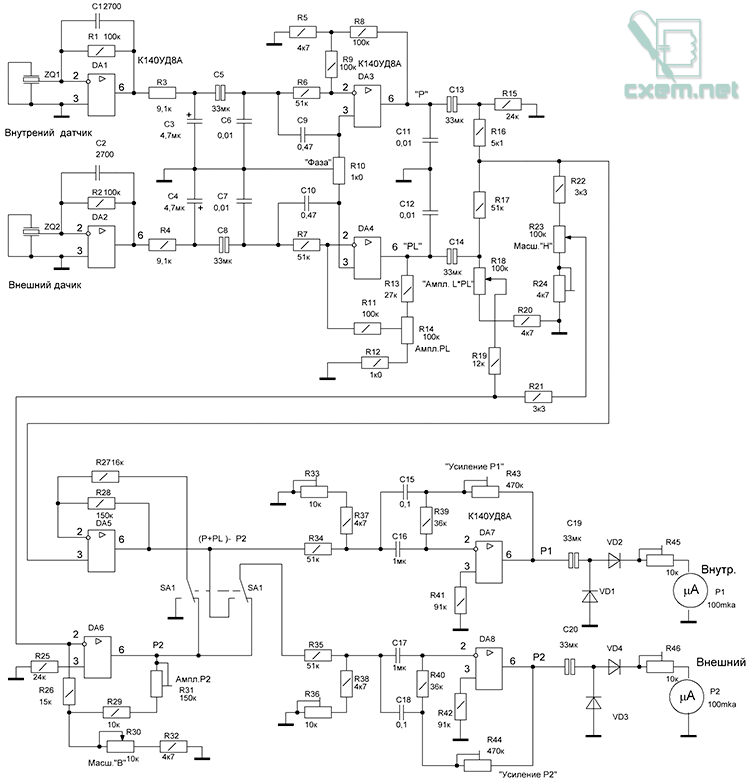
Два канала усиления сигнала датчиков позволяют достаточно точно выполнить балансировку колёс в динамическом режиме.
В состав схемы входят: предварительные усилители сигнала датчиков дисбаланса ZQ1, ZQ2; фильтр верхних частот; регулятор фазы – R10 с последующем усилением сигнала; аналоговый мост масштабирования с установочными резисторами R18 — произведения дальности(от датчиков) до внутренней поверхности колеса на амплитуду сигнала датчика внешней стороны колеса, R23 — масштаба толщины колеса; R30 — масштаба диаметра колеса; сумматора уровней сигнала внешнего и внутреннего канала на усилителе DA5 и оконечных усилителей веса дисбаланса на микросхемах DA7, DA8.
Схема усилителей внутренней и внешней стороны, исследуемого в динамическом режиме колеса, выполнена на операционных усилителях постоянного тока с большим коэффициентом усиления, предназначенных для работы с глубокой обратной связью. Параметры схем полностью определяются видом и характеристиками элементов, включенных в цепь обратной связи.
Почти все усилители в схеме балансировки выполнены с преобразованием входного сигнала поступающего на инвертирующий вход, выходной сигнал имеет фазу противоположную входному. Коэффициент передачи — К при инвертирующем включении определяется параметрами элементов цепи обратной связи К= -Rос / Rвх.
Поскольку неинвертирующий вход микросхем заземлён, то инвертирующий вход можно рассматривать как точку «кажущейся земли».
Входные каскады усилителей на микросхемах DA1-DA2 имеют коэффициент передачи не менее 100,что достаточно для предварительного усиления сигналов внешнего и внутреннего датчика сигналов на основе пъезоэлементов ZQ1-ZQ2.
Из-за наличия в цепи обратной связи ёмкостей, частота входного сигнала ограничена на уровне 1200 Гц, усилители работают как интеграторы верхних частот. Это позволяет снять входные высокочастотные шумы от внешних механических воздействий на источник сигнала с высоким сопротивлением. Т- образный мост на выходах усилителей DA1,DA2 дополнительно снижает полосу частот до 120 Герц. Через конденсаторы С9,С10 сигналы поступают на неинвертирующие входа дифференциальных усилителей — 3DA3, 3DA4, и через резисторы R6,R7 на инвертирующие входа- 2DA3, 2DA4, что создаёт фильтр высоких частот с частотой среза 20 Герц.
Разность 2-х входных напряжений сигналов и является сочетанием инвертирующего и неинвертирующего входа усилителей.
Выходное напряжение сигнала равно — U вых = Rос/ Rвх (U1-U2). U1,U2 — напряжение на входах операционных усилителей. Поскольку напряжение на инвертирующих входах ниже, из-за ограничительных резисторов в цепи подачи сигнала, а неинвертирующие входа подключены к источнику сигнала через конденсаторы небольшой ёмкости, выполняется фазозависимая схема усиления 2-х каналов с регулировкой резистором R10.
Амплитуду выходного сигнала усилителя на микросхеме DA4 возможно дополнительно выставить резистором R14, им же меняется частота среза.
Оба сигнала с выходов усилителей 6 DA3, 6 DA4 через неполярные конденсаторы C13, C14 поступают для масштабирования на мост, одно из плеч которого составляют резисторы R17, R18, R20 в другом плече резисторы R22,R23,R24.
Диагональ моста, состоящая из резисторов R19,R21 подключена к движкам установочных резисторов R18,R23 — для масштабирования.
Колебания в датчиках, установленных на стойках подшипников крепления вала балансировочной машины — одинаковой полярности, но разные по амплитуде, ввиду разнесения стоек крепления подшипников. Это позволяет при использовании 2-х каналов обработки сигнала небаланса алгебраически суммировать их в точке соединения резисторов R16,R17, с учётом положения подстроечного резистора R14-амплитуда внешнего датчика и фазы обработки – резистора R10. Суммарный сигнал поступает на неинвертирующий вход 3 микросхемы DA5.
Установленная резистором R23 ширина исследуемого колеса ( в сантиметрах), с амплитудой зависящей от положения резистора R18 — расстояния от левого (внутреннего) датчика до внутренней поверхности колеса в сантиметрах, установленного на вал балансировочной машины.
Перемычкой моста является цепь из резисторов R19, R21. Диаметр колеса устанавливается резистором R30 — «масштаб-В» в дюймах или сантиметрах.
Сигнал на инвертированный вход микросхемы 2DA6 поступает с точки соединения резисторов R19,R21 моста.
С выхода 6DA6 инвертированный сигнал обратной полярности через переключатель SA1 поступает на инвертируемый вход 2DA5, в результате дифференцирования (суммирования) 2-х противоположных по полярности и разной амплитуде сигналов на выходе 6 микросхемы DA5 определяется суммарный сигнал, который, через ограничительный резистор R34, поступает на инвертируемый вход 2 оконечного усилителя DA7 внутреннего канала усиления.
Сигнал внешнего датчика с выхода 6 микросхемы DA6, после установки соответствующей амплитуды резистором R31, через резистор R35 также поступает на вход оконечного усилителя правого (внешнего датчика) канала 2 DA8.
Интегрирование сигналов перед поступлением на оконечные усилители происходит с помощью входных RC мостов с подстройкой резисторами R33, R36. Дополнительно амплитуду сигнала внешнего канала возможно подкорректировать резистором R31.
Переключатель SA1 позволяет отрегулировать идентичные уровни усиления выходных усилителей DA7, DA8 включенных входами от одного выхода сигнала микросхемы 6DA5.
Выходные усилители имеют частотную коррекцию и подстройку усиления микросхем DA7, DA8 резисторами R43 -«усиление Р1», R44- «Усиление Р2».
Уровень сигнала внутренней и внешней стороны небаланса колеса, после обработки электронной схемой индицируется аналоговым или цифровыми приборами PA1, РА2.
Регулировка правильно выполненной схемы заключается в установке линейки — L, механически связанной с резистором R18 — «Амплитуда L*PL», от левого датчика сигнала до внутренней стороны исследуемого на дисбаланс колеса. Шкала резистора R23 – « Масштаб Н» обозначена в сантиметрах толщины колеса, резистора R30 — «Масштаб В» в дюймах диаметра.
Для регулировки режимов работы схемы берётся ранее отбалансированное колесо. Ручками регуляторов диаметра — R30 и ширины – R23 выставляются размеры колеса, а длина линейки до колеса резистором R18. На внешней стороне колеса закрепляется условный небаланс весом в 100 грамм. После динамического вращения, как правило электродвигателем с передаточным механизмом, приборы P1 или P2 должны показать этот вес, Р2 величиной около 100 грамм, а Р1 от 10 до 100 грамм. Резистором R43 – усиление Р1,снижаются показания до 10 грамм., при наличии расхождений в показаниях, коррекция выполняется регулятором «Амплитуда PL» — R14, при среднем положении подстроечных резисторов R45, R46. Положение груза на внутренней или наружной поверхности колеса регулируется линейкой резистора R18.
После правильной установки веса груза по приборам, проводится устранение дисбаланса – на противоположной стороне колеса устанавливается груз по весу равный дисбалансу, далее после прокручивания колеса, показания веса на измерительных приборах будут близкими к нулю и не превышать десяти граммов.
Такие результаты являются достаточными для дальнейшей эксплуатации колеса.
Авторы: Коновалов Владимир, Вантеев Александр
Список радиоэлементовОбозначение
Тип
Номинал
Количество
ПримечаниеМагазинМой блокнот
DA1-DA8
Операционный усилительК140УД8А8
VD1-VD4
Диод4
С1, С2
Конденсатор2700 пФ2
С3, С4
Электролитический конденсатор4.7 мкФ х 16В2
С5, С8, С13, С14, С19, С20
Конденсатор33 мкФ6
С6, С7, С11, С12
Конденсатор0.01 мкФ4
С9, С10
Конденсатор0.47 мкФ2
С15, С18
Конденсатор0.1 мкФ2
С16, С17
Конденсатор1 мкФ2
R1, R2, R8, R9, R11, R14
Резистор100 кОм6
R3, R4
Резистор9.1 кОм2
R5
Резистор4.7 кОм1
R6, R7, R17, R34, R35
Резистор51 кОм5
R10, R12
Резистор1 кОм2
R13
Резистор27 кОм1
R15, R25
Резистор24 кОм2
R16
Резистор5.1 кОм1
R18, R23
Переменный резистор100 кОм2
R19
Резистор12 кОм1
R20
Резистор4.7 кОм1
R21, R22
Резистор3.3 кОм2
R24
Подстроечный резистор4.7 кОм1
R26
Резистор15 кОм1
R27
Резистор16 кОм1
R28
Резистор150 кОм1
R29
Резистор10 кОм1
R30
Переменный резистор10 кОм1
R31
Подстроечный резистор150 кОм1
R32, R37, R38
Резистор4,7 кОм3
R33, R36, R45, R46
Подстроечный резистор10 кОм3
R39, R40
Резистор36 кОм2
R41, R42
Резистор91 кОм2
R43, R44
Подстроечный резистор470 кОм2
ZQ1, ZQ2
Пьезоэлемент2
SA1
Переключатель(P+PL)-P21
Р1, Р2
Микроамперметр100 мкА2
Добавить все