
Схема стабилизатора оборотов (как и другие аналогичные) основана на получении сигнала, пропорционального частоте вращения
Основных отличий два:
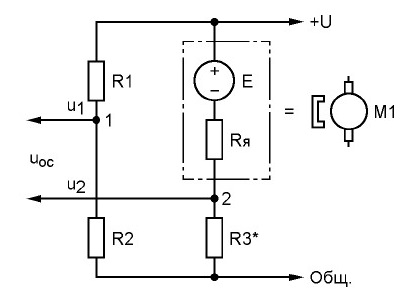
— для выделения напряжения пропорционального частоте вращения якоря используется мостовая схема, которая позволяет выделять напряжение противо-ЭДС ротора, пропорциональное скорости вращения
Далее полученное напряжение Uoc можно использовать для обратной связи по сути любого источника питания.
В описываемой схеме мост выглядит следующим образом
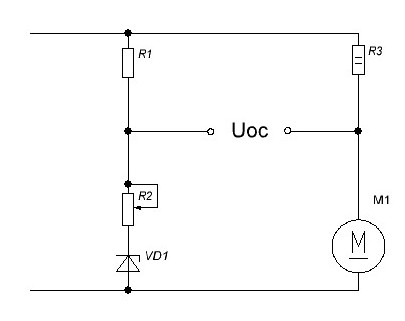
При соблюдении пропорции R1/R2 = R3/Rя (Rя — сопротивление якоря) и при Uос = 0 — мы получим компенсацию Rя и соответственно Е противо-ЭДС ротора будет равно напряжению стабилизации VD1
Если VD1 сделать регулируемым, то, по сути, меняя напряжение его стабилизации, мы меняем напряжение непосредственно на роторе двигателя (скомпенсировав влияние Rя) и обеспечиваем стабильность скорости вращения.
В данном случае за основу была взята TNY268P в стандартной схеме включения (по даташиту)
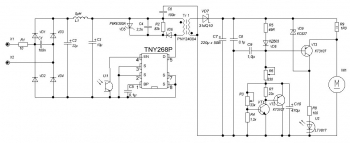
Левая от трансформатора часть схемы — стандартная обвязка TNY268 (может быть по сути использована за основу любая конструкция ИБП с максимально широким диапазоном выходного напряжения (этот диапазон определяет диапазон изменения скорости ротора) и требуемой мощностью.
В правой части схемы собственно мост образуют резисторы R5, R6 и R9 (аналогично R1, R2 и R3 на схеме на среднем рисунке).
VT1, VT2 и обвязка из резисторов R3, R4, R7 образуют аналог стабилитрона с регулируемым напряжением стабилизации (можно заменить на TL431).
Собственно Uос появляется между базой и эмиттером VT3, который управляет током светодиода в оптопаре U2, создавая обратную связь.
VD8 введен как компенсатор напряжения база-эмиттер VT3. Емкости C9 и C10 придаю стабильность узлу обратной связи.
Стабилитрон VD9 ограничивает максимальное напряжение на выходе источника питания и, при наличии встроенной защиты от перенапряжения, не нужен.
При подготовке схемы под конкретную модель электродвигателя возможно номинал R5 будет другим (для соблюдения пропорции R5/(0,7*R6) = R9/Rя. Падение напряжения на R9 при номинальном потребляемом токе должно быть около 1В, больше нежелательно — будет сильно греться.
При настройке подстроечным резистором R6 выбираем нужную степень обратной связи, притормаживая двигатель рукой и делая им обороты, наиболее близкие к оборотам без нагрузки, но в то же время не допуская «подергиванием» якоря без нагрузи.
Схема показала хорошую повторяемость, работает как для польской электродрели / шлифовалки 12В Pegasus (вот такой) и работала с другим моторчиком на 24В.
{kind=link}
Обороты регулируются от 500 до 12000 об/мин с очень хорошей стабильностью (рукой трудно удержать). Элементы греются незначительно — в основном R9.