
Разработанное устройство представляет собой электронную игрушку, управляемую световыми импульсами на расстоянии, а в частности — при помощи лазерной указки. В качестве световых датчиков в устройстве используются четыре фоторезистора. Робот выполняет команды: Вперед, Вправо, Влево, Стоп. Управление роботом осуществляется подачей световых импульсов на датчики (фоторезисторы). Каждый датчик отвечает за определенную команду. Датчик расположенный «на носу» корпуса робота отвечает за команду Вперед, левый фоторезистор — поворот Влево, правый фоторезистор — поворот Вправо, фоторезистор который находится сзади — команда Стоп. Обработку сигналов, принятых с фоторезисторов выполняет программа инициализации микроконтроллера. В представленной схеме устройства используется микроконтроллер PIC16F872. Питание устройства производится от 3-х пальчиковых батареек номиналом 1,5 В. Схема разработанного устройства представлена на рисунке 1. На рисунке 2 показан внешний вид устройства без корпуса. Разводка печатной платы 2-хслойная (рис. 3). Устройство было смоделировано в программе Crocodile Technology. Данная программа имеет свой PCB-редактор (рис. 4 — Разводка печатной платы устройства в PCB-редакторе программы Crocodile Technology). Рисунок 5 демонстрирует алгоритм работы программы инициализации микроконтроллера.
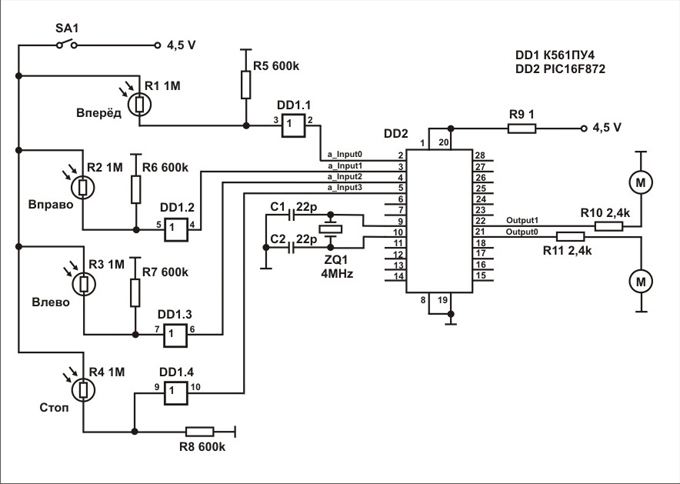
Рис. 1. Схема разработанного устройства.
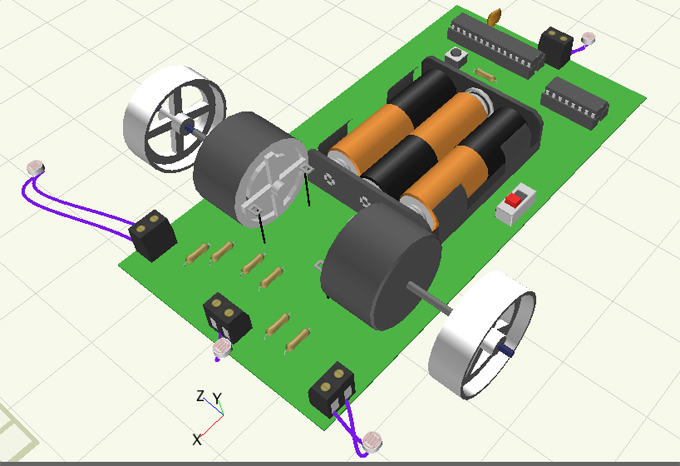
Рис. 2. Внешний вид устройства без корпуса.
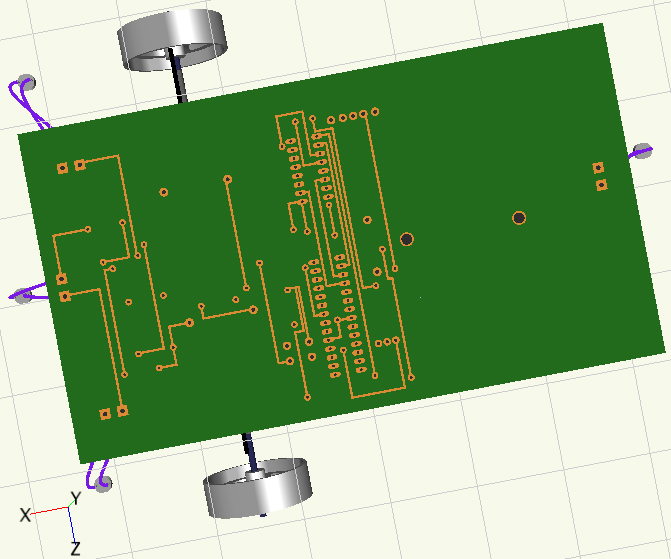

Рис. 3. Разводка печатной платы.
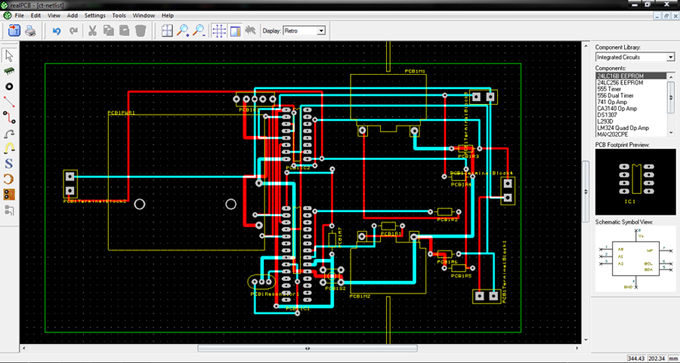
Рис. 4. Разводка печатной платы в PCB-редакторе программы Crocodile Technology.
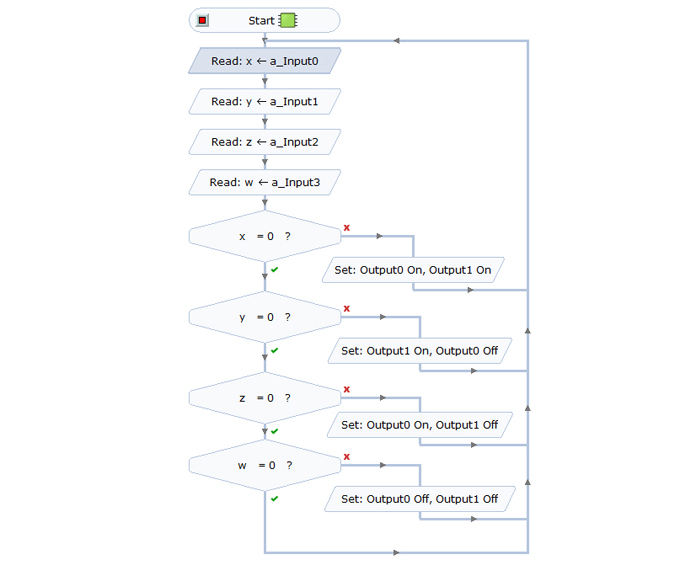
Рис. 5. Алгоритм работы программы инициализации микроконтроллера.
Программа опрашивает порты микроконтроллера. Если на каком-то из портов появляется логическая единица (срабатывает фотодатчик) — на выходы микроконтроллера подается одна из комбинаций: 11, 01, 10, 00, что приводит в движение (или наоборот – останавливает) соответствующий мотор, а значит и колесо робота.
Таблица 1. Таблица логических сигналов управления устройством.
Вход МК
Выход МК
Команда
1000
11
Вперед
0100
01
Вправо
0010
10
Влево
0001
00
Стоп
Схема и смоделированное устройство в программе Crocodile Technology находится в прикрепленном файле Sxema_robot.cxt. Причина, по которой нельзя в данной схеме использовать шифратор. Комбинация логических сигналов сохраняется на выходах микроконтроллера до тех пор, пока на его входе не появится новая команда (новая логическая единица — импульс света). То есть программа микроконтроллера не реагирует на комбинацию 0000 на входе. При использовании шифратора при исчезновении импульса света устройство остановится. Таким образом, для того, что бы робот был в движении — необходимо было бы постоянно удерживать световой луч на датчике, что, по моему мнению, неудобно при управлении устройством. В нашем случае для того, что бы привести в движение устройство достаточно кратковременного импульса света.
Список радиоэлементовОбозначение
Тип
Номинал
Количество
ПримечаниеМагазинМой блокнот
DD1
МикросхемаК561ПУ41
DD2
МК PIC 8-битPIC16F8721
С1, С2
Конденсатор22 пФ2
R1-R4
Фоторезистор1 МОм4
R5-R8
Резистор600 кОм4
R9
Резистор1 Ом1
R10, R11
Резистор2.4 кОм2
ZQ1
Кварцевый резонатор4 МГц1
Электродвигатель2
SA1
Выключатель1
Батарея питания1.5 В3
Добавить все
Скачать список элементов (PDF)
Прикрепленные файлы:
- Sxema_robot.rar (31 Кб)