
Эта статья расскажет вам, как сделать робота для чистки полов, используя модули Vex Robotics.
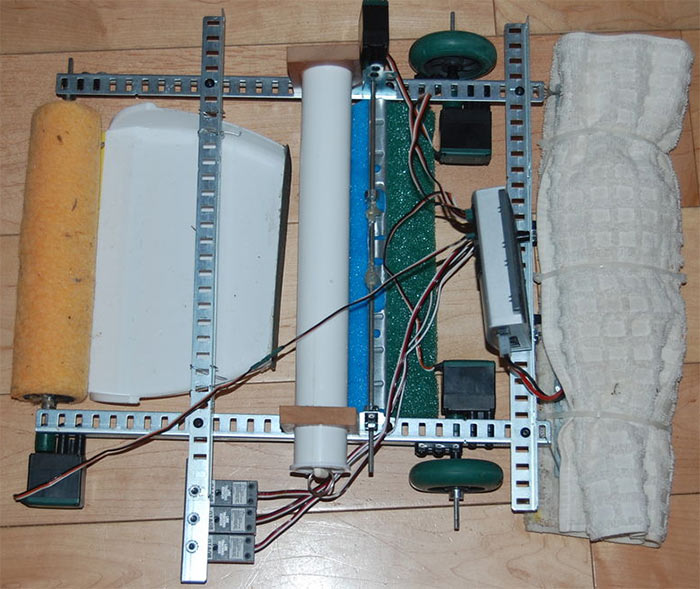
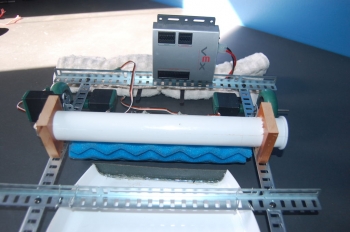
Для удаления загрязнений, робот использует малярный валик, которым он подбирает крошки и крупный мусор, перемещая их в совок. Кроме того, в основании рамы, установлена подвижная, поролоновая швабра, на которою в свою очередь, из специального резервуара капает вода. А полотенце в задней части робота, волочась, сушит пол и удаляет все оставшиеся загрязнения.
Робот не нуждается в контроле и наблюдении, так — как является автономным.
Видео:
Необходимые комплектующие
Для этого робот вам понадобится:
— Vex Micro-контроллер с аккумулятором.
— Vex комплект датчиков линии.
— 4 Vex мотор-редукторы.
— 1 Vex сервопривод.
— 2 Короткие квадратные оси.
— 2 12дюймовые квадратные оси.
— 2 пластиковые проставки-подшипники.
— 2 Резиновые колеса.
— Стяжки для проводов.
— Изоляция для проводов.
— Обрезки досок.
— 9 Дюймовый, малярный валик.
— Совок с резиновым краем.
— 12 дюймовые пластиковые водопроводные трубы с 2 пробками, которые вставляются в торец (труба должна быть примерно 1,5 см в диаметре).
— Полотенце.
— Металлический монтажный профиль.

* Любой из этих компонентов может быть заменён другими, но если использовать другую электронику, то вам придётся переписывать программу.
Сделаем основание.
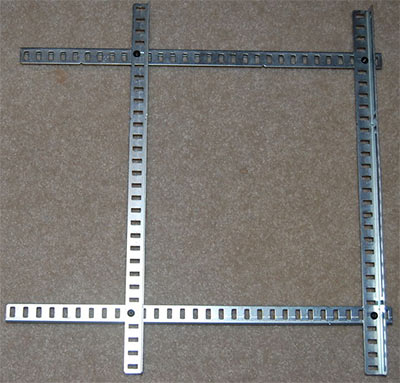
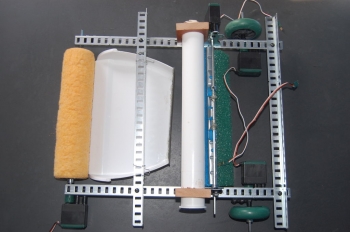
Для этого просто скручиваем четыре металлических профиля под углом 90 градусов друг к другу, так чтобы получился квадрат. При этом переднюю перекладину необходимо удалить от края на 10 сантиметров.
Устанавливаем задние колёса и валик
Установка колёс:
Прикручиваем пластиковую проставку через отверстия в профиле, когда винт выйдет с другой стороны прислоняем к профилю мотор – редуктор, так чтобы совпали отверстия. Теперь сдвиньте ось и поставьте ступицу между мотор – редуктором и профилем. Устанавливаем на оси колёса и затяните винты.

Установка чистящего валика:
Устанавливаем поддерживающие проставки на профиль. С правой стороны устанавливаем приводной мотор. Затем, внутри валика размещаем пластиковые ступицы с квадратными отверстиями. Берем 12 дюймовую ось и пропускаем её через пластиковые проставки, ступицы в валике, и соединяем с осью мотора.

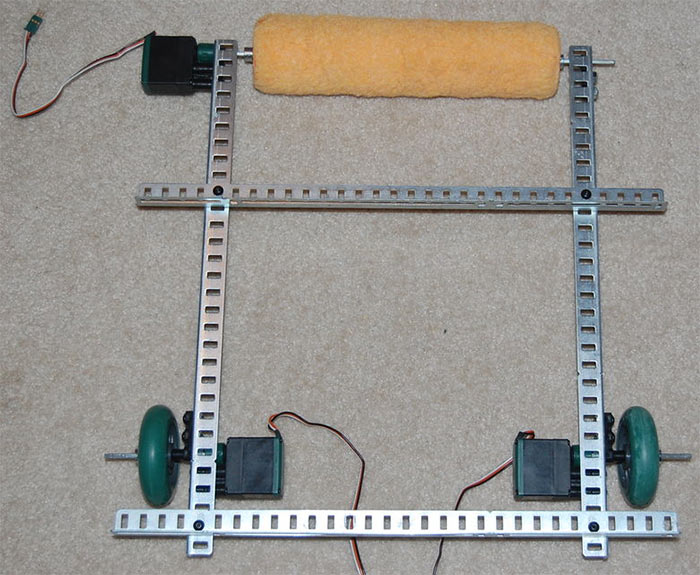
* Посмотрев на фото можно получить больше информации о выполнении этой стадии работы.
Устанавливаем поролоновую швабру.

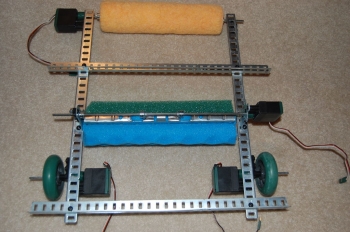
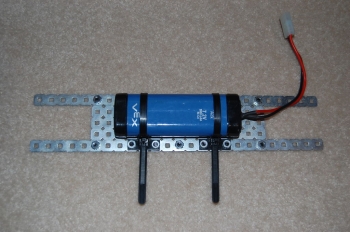
Для начала возьмём саму швабру и обрежем её по длинне, от металлического основания отогнём два L – уголка, с помощью которых мы будем крепить швабру к оси. Механизм приводится в движение сервоприводом. Для передачи качения, необходимо прикрепить квадратную 12 дюймовую ось к сервоприводу с помощью X – образного кронштейна. Как и в случае с валиком, ось опирается на пластиковые проставки – подшипники. Чтобы швабра не проскальзывала на оси, L уголки необходимо согнуть друг к другу и зафиксировать их положение с помощью металлических ступиц, если этого будет недостаточно – залить горячим клеем.
Устанавливаем совок


Теперь можно прикрепить совок. Совок необходим для сбора мусора от валика. Первым делом отмечаем несколько дюймов от задней стенки и отрезаем, так чтобы совок помещался в основание. Заднюю стенку заклеиваем листом пластика. Затем возьмём паяльник и проплавим небольшие отверстия в боковых бортиках совка, на расстоянии около дюйма от заднего бортика и около сантиметра от верха. Поместите совок под рамой, вплотную к валику, и прикрепите его с помощью проволоки. Совок должен легко нагибаться, чтобы вы могли скинуть мусор в ведро.
Установка резервуара для воды

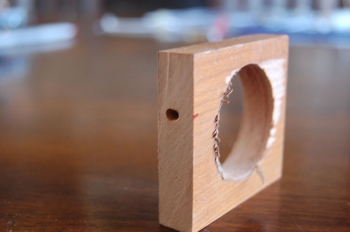

Чтобы установить бак для воды, возьмите два обрезка древесины около половины дюйма толщиной и вырежьте в них, с помощью коронок по дереву, два отверстия, диаметром чуть больше, чем диаметр бака, который вы используете. Теперь, необходимо проделать отверстия в баке. Для этого, подогреваем на огне скрепку и проплавливаем, в резервуаре, в один ряд, пять отверстий, и ещё одно на 60 градусов выше других, для поступления воздуха. Заливаем в бак воду, закрываем его пробкой и устанавливаем в деревянные кольца. Теперь чтобы запустить поток воды, нужно просто провернуть бак в основании, отверстиями вниз.
Полотенце
Для того чтобы полотенце лучше собирало влагу с пола, оно должно быть плотно прижато. Потому мы помести аккумуляторную батарею внутри рамы и закрепим с помощью пластиковых стяжек. Полотенце наматывается на раму и фиксируется при помощи всё тех же стяжек. Получившаяся швабра крепится к основанию робота. Ну а остальное за нас сделает сила тяжести, прижав полотенце к полу.
Установка контроллера и сенсоров
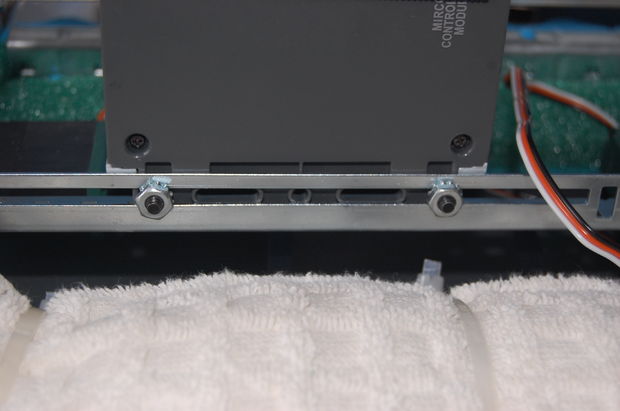
Контроллер прикручиваем на винты, к задней балки, в вертикальном положении (для меня это был самый простой способ). Далее приделываем датчики линии, к левой стороне робота, в один ряд (см. рисунок).

Затем подключаем всё следующим образом:
— Правый приводной двигатель — порт № 1
— Левый приводной двигатель — порт № 2
— Сервопривод — порт # 3
— Привод валика порт № 8 (вероятно придётся использовать удлинитель)
— Правый датчик линии на вход № 1
— Средний датчик линии на вход № 2
— Левый датчик линии на вход № 3
Программа для контроллера, и использование робота
Код управления роботом, смотри в прикрепленном файле. Для программирования управляющего блока Vex, я использовал визуальный язык программирования EasyC.
Для того, чтобы робот ехал туда, куда вы хотите, просто наклейте на пол тёмную изоляционную, или другую, ленту, которая должна имеет около половины дюйма в ширину.
Заполните бак водой и переверните его так, чтобы вода начала капать на швабру, поставьте робота рядом с линией, чтобы датчики находились непосредственно над линией, и включите контроллер.
В будущем я надеюсь, добавить устройство для управления потоком воды, а также использовать для навигации по всему дому ультразвуковые датчики. Чтобы можно было обойтись без наклеивания на пол изоленты.
Прикрепленные файлы:
- robot.hex (54 Кб)