
Тач-сенсоры (датчики касания) бывают разных принципов действия, например резистивный (проводящие пленки), оптический (инфракрасный), акустический (SAW), емкостной и т.д. Данный проект является экспериментом с емкостным датчиком касания. Этот вид датчика хорошо известен как указывающее устройство, используемое в планшетных ПК и смартфонах.
Принцип емкостного датчика касания
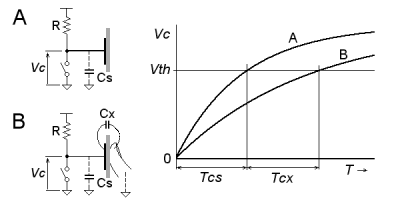
Емкостный датчик касания обнаруживает изменение емкости, происходящее на электроде от закрытия проводящим предметом, например пальцем. Есть несколько методов измерения емкости. В этом проекте используется метод интеграции, который используется в измерителе емкости. Изменение емкости Cx довольно небольшое, около 1пФ до 10пФ, но оно будет легко обнаружено , потому что у измерителя емкости разрешение измерения составляет 20пФ. Также, объекты, которые будут обнаруживаться должны быть заземлены, чтобы создать Cx схему согласно с принципом действия. Но она хорошо работает, даже если человеческое тело изолировано от земли. Это может быть по нижеследующей причине.
Проводящие объекты с такой площадью поверхности имеют собственную емкость. Конкретно, C=4πε0r на поверхности шара, ε0 электрическая постоянная, r радиус. Тело человека имеет собственную емкость около 100пФ в соответствии с человеческой моделью для ESD теста. Это достаточно много по сравнению с Cx. Таким образом, человеческое тело можно рассматривать как заземленный провод, даже если оно не заземлено. Конечно, оборудованию тоже требуются провод заземления или собственный емкостный эквивалент человеческому телу. Но в сочетании с землей или человеческим телом, с помощью различных паразитных емкостей и создается цепь Cx.
Аппаратная часть
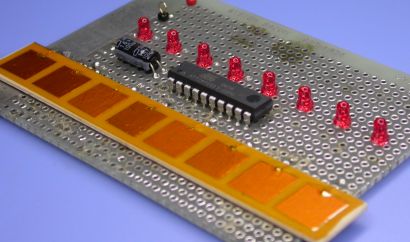
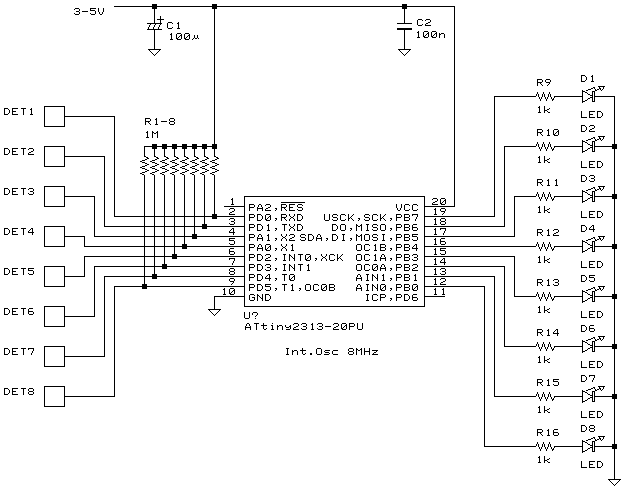
Электрод датчика (сенсорная область) является 10мм квадратной медной пластиной расположенной на печатной плате и покрытой сверху изоляцией (каптоновой лентой). В качестве схемы датчика используется ATtiny2313 с подтягивающим резистором 1МОм. Время интеграции при нормальном состоянии определяется значением подтягивающего резистора и паразитной емкости на порту и электроде. Когда к электроду прикасаются пальцем, время интеграции увеличивается и можно обнаружить касание. Фактическое время интеграции от нескольких мкс до нескольких десятков мкс.
Программное обеспечение
Во-первых, откалибруйте каждую точку (получите эталонное время связи с Cs), а далее запустите сканирование в постоянном периоде. Когда время интеграции увеличился и превысит порог, он решит “обнаружено”. Гистерезису требуется порог, или выход не будет стабильным при полу прикосновении. Время измерения для каждой точки равно времени интегрирования, так что это может быть сделано очень быстро.
Измеритель емкости измеряет время интеграции с разрешением один такт (100 нс) с аналоговым компаратором и функцией входной фиксации. Но эта функция не доступна на всех портах ввода/вывода. Для реализации датчика касания на любом порту ввода/вывода, время интеграции измеряется опросом программным обеспечением, и разрешение становится 3 такта (375ns). В нормальном состоянии число отчета времени около 80, и это достаточно для сенсорных кнопок.
Заключение
В результате, я могу подтвердить, что емкостный сенсор может быть с легкостью реализован на обычном микроконтроллере . Пластиковая накладка может быть до 1 мм в толщину (в зависимости от диэлектрической проницаемости) для хорошей работы. Когда ATtiny2313 используется для модуля датчиков касания, она может иметь 15 точек прикосновения. Программа управления, используемая в этом проекте экспериментальна, и не проверялась в грязных условиях, таких как шумы и помехи, так что для реального использования может потребоваться любой анти-шумовой алгоритм.
Список радиоэлементовОбозначение
Тип
Номинал
Количество
ПримечаниеМагазинМой блокнот
U?
МК AVR 8-битATtiny2313-20PU1
R1-R8
Резистор1 МОм8
R9-R16
РезисторR9-R168
C1
Электролитический конденсатор100 мкФ1
C2
Конденсатор100 нФ1
D1-D8
Светодиод8
Добавить все
Скачать список элементов (PDF)
Прикрепленные файлы:
- capsens.zip (8 Кб)