
Внимание! Данным материалом руководствоваться не стоит, т.к. в нем много ошибок, неточностей и путаницы. Подробнее об этом здесь
Очень часто, при реализации технологического процесса, возникает необходимость уменьшить производительность агрегатов или механизмов с электродвигателем. Причем это уменьшение бывает вызвано не слишь экономией электроэнергии, сколько требованиями выполнения качества самого тех. процесса. От насосов, компрессоров, вентиляторов и пр. требуется не максимум того, что они могут выдать, а лишь необходимый объем. Мы не собираемся здесь обсуждать регулирование частоты электродвигателей свыше их номинальной частоты вращения, поскольку в этом случае возникает необходимость в применении частотного преобразователя. Будем рассматривать лишь те случаи, когда есть возможность и необходимость понижения частоты вращения ( и ,как следствие, производительности) при сохранении, по возможности, его момента вращения.
Поводом для написания статьи послужил случай. Занимаясь схемой управления двигателем от Arduino с использованием стандартной функцией AnalogOutput я с удивлением обнаружил, что если применять эту функцию совместно с твердотельным реле типа MOC3083 или аналогичным, с переключением при переходе через ноль, то скорость вращения вентиляторного двигателя регулируется довольно неплохо. Это казалось странным, поскольку частота ШИМ у Arduino, была довольно высока — порядка 1000Гц, по сравнению с частотой сети 50Гц. Потому возникло желание проверить эту идею для простых схем на базе стандартной логики [1].
Возьмем, для начала, за основу схему рис.1 из статьи: /me/pitanie/5-313.php и модифицируем ее таким образом, чтобы была возможность управления симистором не с помощью оптопары MOC3023, а оптопарой со встроенной схемой переключения при переходе напряжения через ноль, например: MOC 3083. ШИМ – генератор DD1.2 модулятор, также модифицируем, таким образом, чтобы его частота была выше 100Гц, например, около 1400Гц. Подключив теперь в качестве нагрузки электродвигатель имеем возможность регулировать его частоту вращения. Что здесь реально происходит? В зависимости от положения потенциометра мы определяем процентное соотношение логического нуля и единицы на выходе ШИМ –генератора DD1.2 .в
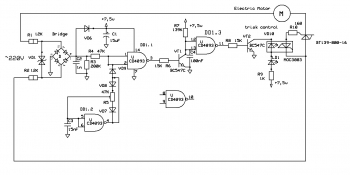
Рис 1
Чем больше процент нулевого уровня , тем выше вероятность пропуска импульса синхронизации сети схемой совпадения на DD1.1 на управление оптопарой MOC3083. Схема работает как бы по случайному закону с равномерным распределением вероятности. Мы получили как бы стохастическую схему, работающую на основе нечеткой логики (англ. fuzzy logic), работа которой напоминает игру в кости: когда вероятность выпадания определенного значения равновероятно и равно 1/6, что соответствует 1/6 соотношения нуля и единицы в ШИМ генераторе. Схема, достаточно плавно, регулирует скорость вращения коллекторных электродвигателей с фазным ротором и асинхронных однофазных двигателей с фазосдвигающим конденсатором. В последнем случае необходимо уточнить, что асинхронный двигатель должен быть разработан именно для однофазного применения. В случае использования 3-хфазного мотора, приспособленного под однофазную сеть (путем включения в цепь одной из обмоток фазосдвигающего конденсатора) вращение может начаться лишь на номинальной частоте. Это справедливо и для некоторых однофазных асинхронных двигателей, например от старых советских стиральных машин, в которых предусматривалось подключение на время пуска дополнительного пускового конденсатора (и для этой цели существовал даже специальный выключатель).
Почему я не выбрал для схемы более простой вариант типа диммера? Здесь будет уместно повторить тезисы из статьи /me/pitanie/5-313.php
1. Благодаря пропуску целых полупериодов напряжения не возникают резкие переходные процессы, которые часто приводят в помехам в питающей сети и в эфире.
2. Силовой симистор находится в более благоприятной зоне регулирования (при переходе сетевого напряжения через 0)и, следовательно, имеет меньше вероятности выйти из строя.
Также напрашивается и такой аргумент в пользу использования регулирования количеством полных периодов : как и в случаях применения частотных преобразователей, при уменьшении частоты должно уменьшаться и напряжение. В случае импульсно фазового управления, напротив, при уменьшении напряжения спектр частот результирующего напряжения «обогащается» высокочастотными гармониками. Эти высшие гармоники, по–видимому, приводят лишь к дополнительному разогреву электродвигателя.
Если же опираться не лишь на нечеткую логику, то можно предположить, что лучше было бы выполнять коммутацию не в течение полупериода, а охватить период сетевого напряжения (т.е. длительностью промежутка в 20мс). Для этой цели служит одновибратор на элементе DD1.3, который перезапускается всякий раз удачно прошедшим схему совпадения DD1.1 импульсом синхронизации. Длительность импульса одновибратора выбирается в районе 15мс, для того, чтобы включались любые два смежных полупериода, с целью надежного перемагничивания магнитопровода статора. Ещё большее значение этот фактор имеет в случае управления 3-хфазными машинами. Включающий импульс должен в этом случае длиться в течение всего цикла кругового электромагнитного поля 3-хфазного двигателя, что составит примерно 25мс. Однофазный вариант регулятора представлен на фотографии.
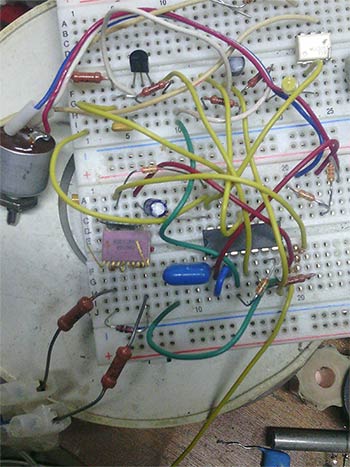
Это фрагмент платы для макетирования без пайки, применение которой, по моим прикидкам, увеличивает скорость отладки схем в 4—5 раз. Схема регулятора скорости для 3-хфазного двигателя представлена на рис.2 .
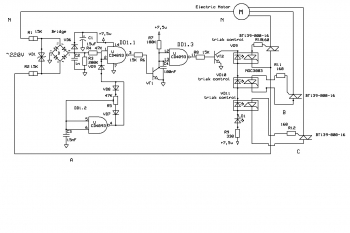
Практическая проверка данного варианта, ввиду отсутствия 3-хфазного напряжения 220/380В не проводилась.
Для любителей схем с микроконтроллерами можно рекомендовать обратить внимание на схемы, реализующие алгоритм Брезенхема. Здесь также задача сводится к минимизации интервалов отсутствия подачи питания на электродвигатель, но путем определенного алгоритма жесткой логики. Пример подобной схемы есть на http://kazus.ru/shemes/showpage/0/896/1.html., предполагая, конечно, использование MOC3083 или аналогичной. Правда, использование в ней микроконтроллера серии AT89C2051 может вызывать трудности в виду того, что для загрузки кода требуется специальный программатор, а также того, что данный тип микроконтроллеров постепенно уходит с авансцены массового применения.
Список литературы:
1. С.А. Бирюков, Цифровые устройства на КМОП интегральных микросхемах, Москва «Радио и связь» 1996