
Время входит в число самых фундаментальных величин. С ним физики связывают многие процессы на Земле. Очевидным для человека является, например, движение тел. Знания законов физики и правильная постановка эксперимента помогают человеку из времени и констант выражать другие величины. Используя разные измерительные приборы можно эмпирически исследовать физические процессы. Для проведения экспериментов по классической механике мной был разработан комплекс приборов.
Классическая механика — вид механики (раздела физики, изучающей законы изменения положений тел и причины, это вызывающие), основанный на 3 законах Ньютона и принципе относительности Галилея. Важное место в классической механике занимает существование инерциальных систем. Классическая механика подразделяется на кинематику (которая изучает геометрическое свойство движения без рассмотрения его причин), статику (которая рассматривает равновесие тел) и динамику (которая рассматривает движение тел) [1].
Время в классической физике — непрерывная величина, априорная характеристика мира, ничем не определяемая. В качестве основы измерения просто берётся некая последовательность событий, про которую считается несомненно верным, что она происходит через равные промежутки времени, то есть периодична. Именно на этом принципе и основаны часы [1].
Тело — материальный объект, имеющий массу, объём и отделенный от других тел границей раздела. Тело есть форма существования вещества [1].
Сила — векторная величина, являющаяся мерой действия на тело со стороны других тел или полей. Сила полностью задана, если указаны её численное значение, направление и точка приложения. Взаимодействие может осуществляться как между непосредственно контактирующими телами (например, при ударе и трении), так и между удалёнными телами. Взаимодействие между удалёнными телами осуществляется посредством связанных с ними гравитационных и электромагнитных полей [12].
Более подробно ознакомиться с теорией классической механике можно в литературе [12], [13].
Разработанный комплекс состоит из приборов, они же модули, число которых зависит от цели эксперимента. Модуль «Главный» является измерительным центром всего комплекса. Помимо сбора логики по двум входам от модулей «Детектор» и записи времени в буфер памяти, модуль автоматизирует процессы ввода и вывода информации, включая коммутацию внешней нагрузки. Основная задача модулей «Детектор» заключается в детектирование ИК-лучём перемещения экспериментального тела. Для физического воздействия на экспериментальное тело используется модуль «Ключ нагрузки». Все модули соединяются шнурами типа «Аудио-видио» с гнёздами RCA. Быстродействие системы модулей, смотреть расчёты 8.
Принцип, который заложен в работе приборов, изображён на рисунке 1. Изображена связь физического события и логики.
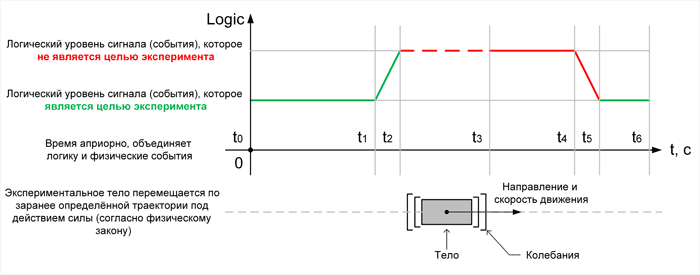
 – Начало эксперимента. Формирование логического уровня задано способом детектирования.
– Начало эксперимента. Формирование логического уровня задано способом детектирования.
 – Ожидание физического события, которое будет являться целью эксперимента. Формирование логического уровня задано способом детектирования.
– Ожидание физического события, которое будет являться целью эксперимента. Формирование логического уровня задано способом детектирования.
 – Передний фронт сигнала. Детектируется физическое событие как цель эксперимента. Формирование логики сигнала, модуль «Детектор». Происходит запись времени в буфер памяти, модуль «Главный».
– Передний фронт сигнала. Детектируется физическое событие как цель эксперимента. Формирование логики сигнала, модуль «Детектор». Происходит запись времени в буфер памяти, модуль «Главный».
 – Интервал времени детектирования физического события (перемещение тела в месте ИК-луча).
– Интервал времени детектирования физического события (перемещение тела в месте ИК-луча).
 – Время удержания логического уровня сигнал в момент детектирования физического события.
– Время удержания логического уровня сигнал в момент детектирования физического события.
 – Задний фронт сигнала. Формирование логики сигнала, модуль «Детектор».
– Задний фронт сигнала. Формирование логики сигнала, модуль «Детектор».
 – Ожидание физического события, которое будет являться целью эксперимента. Формирование логического уровня задано способом детектирования.
– Ожидание физического события, которое будет являться целью эксперимента. Формирование логического уровня задано способом детектирования.
 – Время эксперимента.
– Время эксперимента.
 – Конец эксперимента. Формирование логического уровня задано способом детектирования.
– Конец эксперимента. Формирование логического уровня задано способом детектирования.
По формуле 1 можно рассчитать время задержки логики.
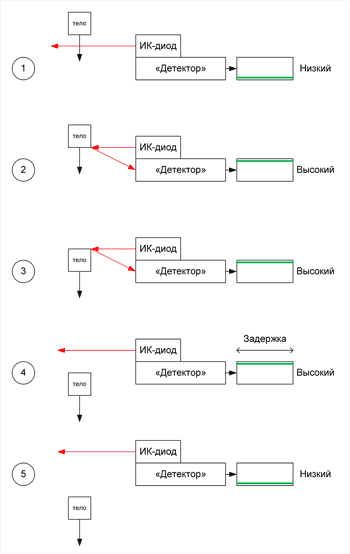
На рисунке 2 изображен «прямой» способ детектирования перемещения экспериментального тела.

На рисунке 3 изображен «на отражение» способ детектирования перемещения экспериментального тела.
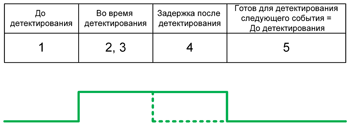
На рисунке 4 изображена временная диаграмма снятая с выхода модуля «Детектор».
Характеристики исследуемых процессов:
1. Во время проведения эксперимента исключается человеческий фактор, потому что система модулей автоматизирована.
2. Химический состав, размер и скорость перемещающегося экспериментального тела должны быть различимы для ИК-луча.
3. При перемещении экспериментального тела нужно учитывать возможные колебания (неравномерный, прерывистый, скачкообразный характер движения). Для детектирования целостности события (перемещения тела в месте ИК-луча) реализована функция фиксированной задержки времени ИК-детектирования – задержка «IR» логики. То есть интервалы времени между детектированием перемещения тела не должна быть меньше установленной задержки. Задержка на точность измерения времени не влияет.
4. Последовательность детектируемых физических событий не должна быть меньше 1мс и больше 65.5с.
5. Количество детектируемых физических событий не превышать 17 раз на вход (поток*).
* Поток – система из последовательно подключенных модулей «Детектор» и (или) «Ключ нагрузки» на один вход модуля «Главный».
Достоинства детектирования перемещения экспериментального тела ИК-лучом:
1. ИК-луч не оказывает физического воздействия на перемещающееся экспериментальное тело (бесконтактный способ детектирования в рамках классической механике).
2. ИК-луч позволяет детектировать перемещение экспериментального тела в светопронинцаймой среде. Важно учитывать возможный угол преломления ИК-луча на границе раздела сред, способность среды поглощать часть энергии ИК-луча. Таким образом, можно использовать комплекс для проведения лабораторной работы: «Определение коэффициента динамической вязкости жидкости по методу Стокса».
Список некоторых лабораторных работ, которые могут быть выполнены с использованием данного комплекса приборов, приведены в таблице 1. Лабораторные работы можно найти на сайте [2], [3].
Теперь более подробно о создании и эксплуатации данных приборов. Главным аккумулятором информации в модулях «Главный» и «Детектор» является микроконтроллер PIC16F628A. Полный цикл внутрисхемного программирования и отладки PIC16F628A был осуществлён при помощи MPLAB IDE v8.15 (интегрированная среде разработки), MPASM v5.22 (входит в MPLAB IDE v8.15) и MPLAB ICD 2 (внутрисхемный отладчик — «Дебагер»). Два проекта находятся в папках [Main] и [Detector] для одноимённых модулей. Для тех, кто не располагает средствами приведёнными выше, а имеет свою программу для работы с *.HEX файлами и иной программатор, можно в соответствующих проектах найти файлы 16F628ATEMP.HEX. Там же, листинги программ, написанные на языке ассемблер (смотреть 16F628ATEMP.ASM). Документацию на английском языке о среде и аппаратной поддержке, которые использовались в процессе программирования и отладки микроконтроллера PIC16F628A, можно найти на официальном сайте Microchip [4]. Много полезных практических решений по реализации PIC-микроконтроллеров можно найти в литературе [9], [10], [11].
Для крепления печатных плат и дисплея используются 3 мм винты и латунные стойки длиной 5 мм, 15 мм. Файлы для изготовления печатных плат смотреть в папке [Board].
Модуль «Главный»
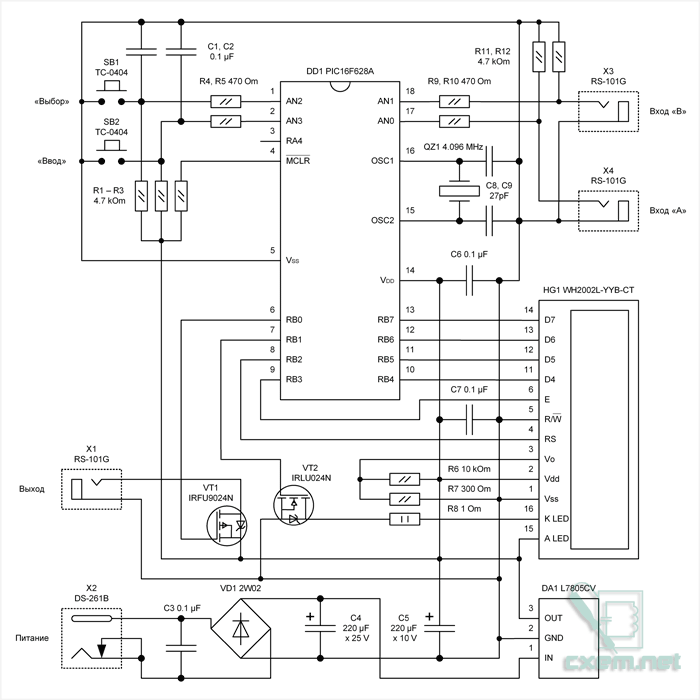
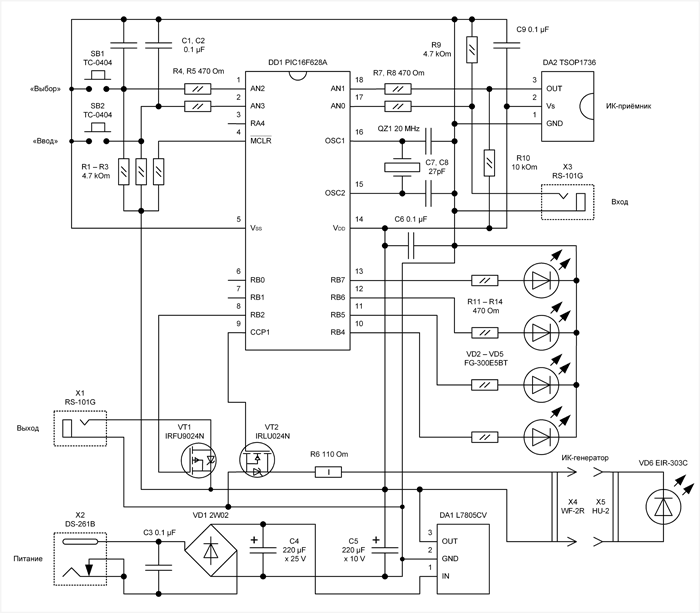
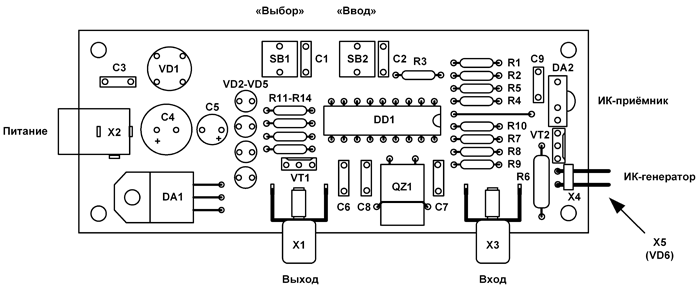
На рисунке 5 изображена схема модуля. Микроконтроллер DD1 имеет порты ввода PORTA и вывода PORTB информации. Микроконтроллер задействует в работе свои модули: Comparator, VREF, TMR2, EEPROM. Функция принудительного сброса отсутствует, вывод  через резистор R3 подключен к +5 В. Для генерации тактовой частоты используют кварцевый резонатор QZ1 и конденсаторы С8 и С9. Для работы счётчика времени нужен кварцевый резонатор с частотой 4.096 МГц. Смотреть расчёты 3. Техническую спецификацию микроконтроллера на русском языке можно найти на сайте [5].
через резистор R3 подключен к +5 В. Для генерации тактовой частоты используют кварцевый резонатор QZ1 и конденсаторы С8 и С9. Для работы счётчика времени нужен кварцевый резонатор с частотой 4.096 МГц. Смотреть расчёты 3. Техническую спецификацию микроконтроллера на русском языке можно найти на сайте [5].
С помощью интегрированных в микроконтроллер 2-х компараторов, происходит распознавание логики входного сигнала. Два компаратора мультиплицированы на четыре входа DD1. В первом состоянии происходит распознавание логики на AN0 и AN1, а во втором — на AN2 и AN3. Оба компаратора подключены к источнику опорного напряжения, настроенного на напряжение 2.5 В. Смотреть расчёты 2. Таким образом, сигнал поданный на входы AN0, AN1 (имеют связь с X4, X3) будет распознан как низкий уровень при напряжении 0-2.5 В, и как высокий уровень при напряжении 2.5-5В. Для AN2, AN3 (имеют связь с SB1, SB2) сигнал будет распознан как высокий уровень при напряжении 0-2.5 В, и как низкий уровень при напряжении 2.5-5 В. Аналоговый сигнал подаётся на DD1 через токоограничивающие резисторы R4, R5, R9, R10, к ним же, подключают резисторы R1, R2, R11, R12, для имитации низкого логического уровня в пассивном состоянии цепи ввода информации. Резисторы R1, R2, R11, R12 являются нагрузкой для источника логики, по току, немногим больше 1 мА. Смотреть расчёты 4. Для управления микроконтроллером используются тактовые клавиши SB1 и SB2. К ним, для уменьшения паразитирующего эффекта «дребезг контактов», подключены конденсаторы C1 и С2. Для снятия сигнала у модулей «Детектор», используют два входа «A» и «B». Они соответствуют разъёмам X4 и X3.
Для отображения информации используется жидкокристаллический дисплей HG1. Техническую спецификацию дисплея смотреть [6]. Он имеет контроллер, в котором реализована функция знакогенерации. Отображает две строки по двадцать символов в каждой. Его главная особенность — большие символы. Управление дисплеем осуществляется через выводы микроконтроллера RB2 – RB7. Загрузка данных происходи полубайтами, через выводы RB4 – RB7. «Защёлка» — RB3. Выбор регистра сигнала формируем на выводе RB2. Резисторами R6 и R7 устанавливаем контрастность HG1. На выводе RB1 формируется логика для управления подсветкой дисплея HG1. К выходу RB1 подключен затвор полевого MOSFET транзистора VT2. Техническую спецификацию о полевых транзисторах смотреть [7]. Он усиливает сигнал выходной логики. Сток VT2 через токоограничивающий резистор R8 подключен к светодиодной подсветке дисплея. Смотреть расчёты 5.
На выходе RB0 формируем логику для управления нагрузкой. К выходу RB0 подключен затвор полевого MOSFET транзистора VT1. Техническую спецификацию о полевых транзисторах смотреть [7]. Он усиливает сигнал выходной логики. Сток VT1 подключен к разъёму X1.
Устройство имеет внешний источник питания, который подключается к разъёму X2. Разъём X2 подключен к диодному мосту VD1, параллельно с фильтрующим конденсатором С3. Если источник питания даёт переменный ток, тогда диодный мост его выпрямляет. Для источника питания постоянного тока, диодный мост пропускает ток в нужном направлении, т.е. нет смысла соблюдать полярность. К диодному мосту VD1 подключен стабилизатор напряжения DA1. К входу и выходу DA1 подключены два фильтрующих электролитических конденсатора С4 и С5. Входы питания микроконтроллера DD1 и дисплея HG1 блокируются фильтрующими конденсаторами С6 и С7.
На рисунке 6 приведена блок-схема алгоритма работы микроконтроллера в модуле «Главный». (Листинг смотреть Main16F628ATEMP.ASM). Стоит отметить, что схема сравнительно условна. Уровень абстракции – средний. Блок-схема отражает общий принцип аккумуляции данных в DD1. Подключив модуль «Главный» к источнику питания, микроконтроллер выполняет операции, указанные в блоках схемы.

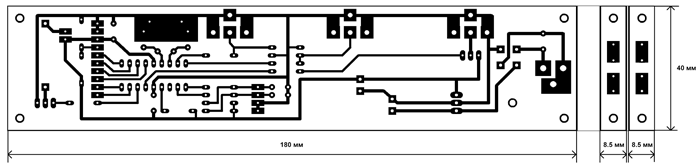
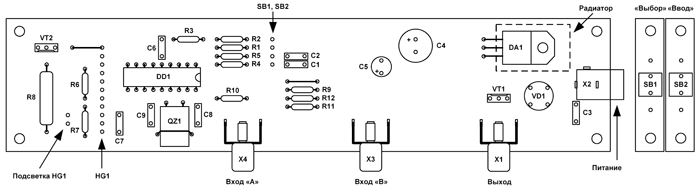
В таблице 2 указаны клавиши и связанные с ними функции. Настройку конфигурации счётчика времени смотреть в таблице 3. Настройку конфигурации состояния нагрузки смотреть в таблице 4. Печатная плата модуля «Главный» изображена рисунке 7. Расположение деталей смотреть на рисунке 8. Пунктиром отмечен алюминиевый радиатор. Он отводит тепло в окружающую среду, которое выделяется на стабилизаторе напряжения DA1.
В данном устройстве можно заменить следующие детали. Микроконтроллер DD1 из серии PIC16F628A-I/P-xxx с рабочей тактовой частотой 20 МГц в корпусе DIP18. Кварцевый резонатор QZ1 с рабочей частотой 4.096 МГц. Стабилизатор напряжения DA1 отечественный КР142ЕН5А (5 В, 1.5 А), на крайний случай L7805ABV (5 В, 1 A). Полевые MOSFET транзисторы VT1 (P-канал) и VT2 (N-канал) в корпусе I-Pak (TO-251AA), подойдут аналоги номиналов указанных на схеме. Диодный мост VD1 на рабочее напряжение не меньше 25 В и ток не меньше 2 А. Разъёмы типа «Тюльпан» X1, X3, X4 из серии RS-101x. Разъём питания X2 аналогичный указанному на схеме с центральным контактом d=2.1 мм. Тактовые клавиши SB1 и SB2 с низким паразитирующим эффектом «дребезг контактов». Дисплей HG1 из серии WH2002х-ххх-хх. Резисторы R1-R5, R9-R12 номиналом, указанным на схеме. Подбором сопротивления резисторов R6 и R7 добиваются нужной контрастности дисплея. Сопротивление резистора R8 рассчитывают по формуле, смотреть расчёты 3.5. Неполярные конденсаторы С1- С3, С6, С7 номиналом 0.01 – 0.47 µF x 50 V. Неполярные конденсаторы С8 и С9 номиналом 15-33 pF x 50 V. Электролитические конденсаторы С4 и С5 ёмкостной номинал тот же, а напряжение не ниже указанного на схеме.

Модуль «Детектор»
На рисунке 9 изображена схема модуля. Микроконтроллер DD1 имеет порты ввода PORTA и вывода PORTB информации. Микроконтроллер задействует в работе свои модули: Comparator, VREF , CCP, TMR2, EEPROM. Функция принудительного сброса отсутствует, вывод  через резистор R3 подключен к +5 В. Для генерации тактовой частоты используют кварцевый резонатор QZ1 и конденсаторы С7 и С8. Техническую спецификацию микроконтроллера на русском языке можно найти на сайте [5].
через резистор R3 подключен к +5 В. Для генерации тактовой частоты используют кварцевый резонатор QZ1 и конденсаторы С7 и С8. Техническую спецификацию микроконтроллера на русском языке можно найти на сайте [5].
С помощью интегрированных в микроконтроллер 2-х компараторов, происходит распознавание логики входного сигнала. Два компаратора мультиплицированы на четыре входа DD1. В первом состоянии происходит распознавание логики на AN0 и AN1, а во втором — на AN2 и AN3. Оба компаратора подключены к источнику опорного напряжения, настроенного на напряжение 2.5 В. Смотреть расчёты 2. Таким образом, сигнал поданный на вход AN0 (имеет связь с X3) будет распознан как низкий уровень при напряжении 0-2.5 В, и как высокий уровень при напряжении 2.5-5 В. Для AN1 (имеет связь с DA2), AN2, AN3 (имеют связь с SB1, SB2) сигнал будет распознан как высокий уровень при напряжении 0-2.5В, и как низкий уровень при напряжении 2.5-5 В. Техническую спецификацию ИК-приёмника смотреть [8]. Аналоговый сигнал подаётся на DD1 через токоограничивающие резисторы R4, R5, R7, R8, к ним же, подключают резисторы R1, R2, R9, R10, для имитации низкого логического уровня в пассивном состоянии цепи ввода информации. Резисторы R1, R2, R9 являются нагрузкой для источника логики, по току, немногим больше 1 мА. Смотреть расчёты 4. Для управления микроконтроллером используются тактовые клавиши SB1 и SB2. К ним, для уменьшения паразитирующего эффекта «дребезг контактов», подключены конденсаторы C1 и С2. Модуль имеет разъём X3 для подключения себе подобного модуля.
Используя модули CCP и TMR2, в микроконтроллере реализована работа модуля ССР в режиме ШИМ (Широтно-импульсная модуляция), сигнал выведен на CCP1. Это нужно для реализации ИК-связи между VD6 и DA2, с несущей частотой ИК-луча 36 кГц. Настраиваем модули CCP и TMR2 на генерацию прямоугольных импульсов меандр частотой 36 кГц. Смотреть расчёты 4. К выводу CCP1 подключен затвор полевого MOSFET транзистора VT2. Техническую спецификацию о полевых транзисторах смотреть [7]. Он усиливает сигнал. Сток VT2 подключают к последовательно соединённой цепи R6 и VD6. ИК-диод подключают к модулю «Детектор» через разъёмы X4 и X5. Подбирая сопротивление резистора R6, добиваемся нужной дальности ИК-связи.
Светодиоды VD2-VD5 подключены к выводам микроконтроллера RB7-RB4, через токоограничивающие резисторы R11-R14. Они отражают состояние работы микроконтроллера. Результат логических операций микроконтроллера формируется на выходе RB2. К выходу RB2 подключен затвор полевого MOSFET транзистора VT1. Техническую спецификацию о полевых транзисторах смотреть [7]. Он усиливает сигнал выходной логики. Сток VT1 подключен к разъёму X1.
Устройство имеет внешний источник питания, который подключается к разъёму X2. Разъём X2 подключен к диодному мосту VD1, параллельно с фильтрующим конденсатором С3. Если источник питания даёт переменный ток, тогда диодный мост его выпрямляет. Для источника питания постоянного тока, диодный мост пропускает ток в нужном направлении, т.е. нет смысла соблюдать полярность. К диодному мосту VD1 подключен стабилизатор напряжения DA1. К входу и выходу DA1 подключены два фильтрующих электролитических конденсатора С4 и С5. Входы питания микроконтроллера DD1 и ИК-приёмника DA2 блокируются фильтрующими конденсаторами С6 и С9.
На рисунке 10 приведена блок-схема алгоритма работы микроконтроллера в модуле «Детектор». (Листинг смотреть Detector16F628ATEMP.ASM). Стоит отметить, что схема сравнительно условна. Уровень абстракции – средний. Блок-схема отражает общий принцип аккумуляции данных в DD1. Подключив модуль «Детектор» к источнику питания, микроконтроллер выполняет операции, указанные в блоках схемы.

В таблице 5 указаны клавиши и связанные с ними функции. Логическую связь между ИК-приёмником, входом и выходом (настройка конфигурации логики) смотреть в таблице 6. Связь между устанавливаемой задержкой ИК-детектирования и свечением светодиода (настройку конфигурации задержки «IR» логики) смотреть в таблице 7. Печатная плата модуля «Детектор» изображена рисунке 11. Расположение деталей смотреть на рисунке 12.
В данном устройстве можно заменить следующие детали. Микроконтроллер DD1 из серии PIC16F628A-I/P-xxx с рабочей тактовой частотой 20 МГц в корпусе DIP18. Кварцевый резонатор QZ1 с рабочей частотой 20.000 МГц. Стабилизатор напряжения DA1 отечественный КР142ЕН5А (5 В, 1.5 А), на крайний случай L7805ABV (5 В, 1 A). ИК-приёмник DA2 — TSOP31236 и аналоги. Полевые MOSFET транзисторы VT1 (P-канал) и VT2 (N-канал) в корпусе I-Pak (TO-251AA), подойдут аналоги номиналов указанных на схеме. Диодный мост VD1 на рабочее напряжение не меньше 25 В и ток не меньше 2 А. Светодиоды VD2 -VD5 рассчитанные на ток потребления не больше 15 мА. Излучающий ИК-диод VD6 рабочей длиной волны 940-960 нм. Разъёмы типа «Тюльпан» X1 и X3 из серии RS-101x. Разъём питания X2 аналогичный указанному на схеме с центральным контактом d=2.1 мм. Разъём X4 угловой «папа» с шагом 2.54 мм. Разъём X5 угловой «мама» с шагом 2.54 мм (ответная часть разъёма X4). Тактовые клавиши SB1 и SB2 с низким паразитирующим эффектом «дребезг контактов». Резисторы R1-R5, R7-R14 номиналом, указанным на схеме. Резистор R6 подбирают экспериментально (настраивают дальность ИК-связи между VD6 и DA2). Неполярные конденсаторы С1- С3, С6, С9 номиналом 0.01 – 0.47 µF x 50 V. Неполярные конденсаторы С7 и С8 номиналом 15-33 pF x 50 V. Электролитические конденсаторы С4 и С5 ёмкостной номинал тот же, а напряжение не ниже указанного на схеме.

Модуль «Ключ нагрузки»
На рисунке 13 изображена схема модуля. Основная задача модуля — коммутация мощной нагрузки и обеспечение освещения места эксперимента. Нагрузка оказывает физическое воздействие на тело. Нагрузкой может быть электромагнит L1 или электродвигатель. Стоит учитывать механическую инертность нагрузки при смене состояний.
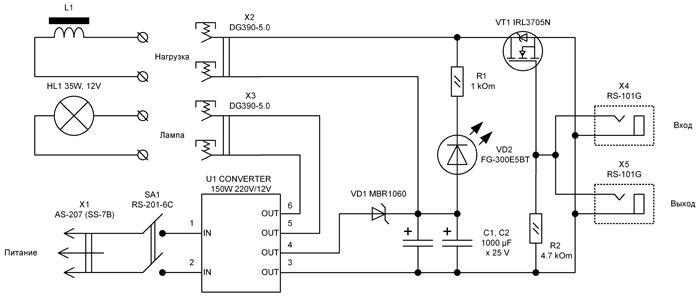
Модуль «Ключ нагрузки» подключается к сети с помощью разъёма X1, включается и выключается тумблером SA1. Импульсный источник питания U1 понижает переменное напряжение сети с 220 В до 12 В. В качестве постоянной нагрузки для U1 выступает галогеновая лампа HL1. Выходное переменное напряжение 12 В с U1 выпрямляется диодом Шоттки VD1 и фильтруется электролитическими конденсаторами C1 и C2.
От модуля «Главный» или «Детектор» на разъём X4 поступает сигнал, который определяет состояние нагрузки. Разъёмы X4 и X5 соединены параллельно. К разъёму X5 можно подключить смежный модуль «Ключ нагрузки» или модуль «Главный». Если на входе отсутствует напряжение высокого логического уровня 2-5В, то резистор R2 имитирует низкий уровень – нагрузка выключена. Резистор R2 создаёт для источника логики нагрузку по току, для одного модуля, немногим больше 1 мА. Смотреть расчёты 5. Если подключена цепочка модулей «Ключ нагрузки» (реализация потока), тогда общий ток нагрузки для источника логики на входе будет равен сумме токов всех модулей. К разъёму X4 подключен затвор полевого MOSFET транзистора VT1. Техническую спецификацию о полевых транзисторах смотреть [7]. Он усиливает сигнал. Сток VT1 подключен к нажимному клеммнику X2 и цепочке из резистора R1 и светодиода VD2. Резистор R1 ограничивает ток и устанавливает напряжение на VD2. Светодиод светится – нагрузка включена.
Для подключения нагрузки и галогенной лампы используются нажимные клеммники X2 и X3. Коммутируемая нагрузка должна быть рассчитана на напряжение 11-14 В и потреблять ток не больше 5 A. Лампа HL1 — напряжение 12 В и мощность 35 Вт.
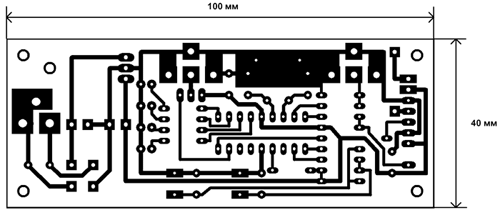
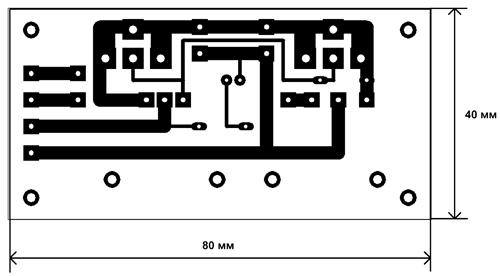
Печатная плата модуля «Ключ нагрузки» изображена на рисунке 14. Расположение деталей смотреть на рисунке 15. Пунктирами отмечены радиаторы игольчатого типа. Они отводят тепло в окружающую среду, которое выделяется на транзисторе VT1 и диоде VD1.
В данном устройстве можно заменить следующие детали. Конвертер U1 – любой источник питания, в том числе и импульсный, преобразующий переменное сетевое напряжение 220 В в переменное напряжение 12 В, мощностью не меньше 150 Вт. Полевой MOSFET транзистор VT1 (N-канал) в корпусе TO-220AB, подойдут аналоги номинала указанного на схеме. Диод Шоттки VD1 в корпусе TO-220AC на рабочее напряжение не меньше 25 В и ток не меньше 10 А. Светодиод VD2 рассчитанный на ток потребления не больше 15 мА. Разъём питания X1 — евровилка сетевая на корпус. Нажимные клеммники X2 и X3 рассчитанные на рабочее напряжение не меньше 25 В и ток не меньше 8 А. Разъёмы типа «Тюльпан» X4 и X5 из серии RS-101x. Резисторы R1 и R2 номиналом, указанным на схеме. Электролитические конденсаторы С1 и С2 ёмкостной номинал тот же, а напряжение не ниже указанного на схеме.

Технические характеристики модулей указаны в таблице 8.

Общая методика проведения эксперимента (лабораторной работы)
1. Чётко понять цель эксперимента, смоделировать процесс эксперимента.
2. Определить точку(и) в системе координат для детектирования перемещения экспериментального тела. Расположить модуль(и) «Детектор».
3. Определить точку(и) в системе координат для воздействия на экспериментальное тело. Расположить модуль(и) «Ключ нагрузки».
4. Подключить и настроить систему модулей «Главный», «Детектор»», «Ключ нагрузки».
5. Провести эксперимент.
6. Выполнить расчёты.
7. Проанализировать эксперимент исходя из полученных данных.
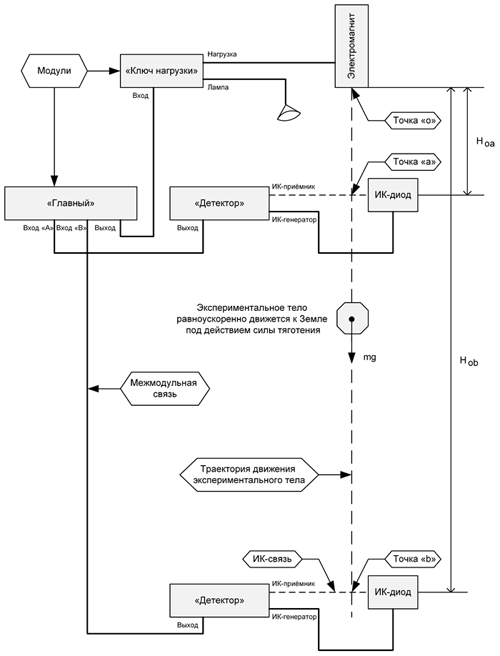
Для демонстрации комплекса приборов была проведена лабораторная работа: «Определение ускорения свободного падения тела». Согласно выше приведённой методике выполним лабораторную работу. Расположим и подключим модули согласно схеме 16. (На схеме не отображены источники питания модулей. ИК-генератор = генератор несущей частоты + ИК-диод). Настроим конфигурации модулей «Детектор»: инвертируем «IR» логику (остальные логики — по умолчанию), задержка «IR» логики 1 мс. Настроим конфигурации модуля «Главный»: «Time(Bd)», «Load(Kdd)». Прикрепляем металлическое экспериментальное тело к электромагниту. Проводим эксперимент. Измерив время падения тела, при известных расстояниях, рассчитаем ускорение свободного падения тела. Смотреть расчёты 9. В идеале искомые величины должны не сильно различаться, потому что экспериментальное тело двигалось к Земле равноускоренно, преодолев малое расстояние под действием консервативной силы тяготения.  — погрешность в измерении расстояния.
— погрешность в измерении расстояния.  — сопротивление воздуха.
— сопротивление воздуха.

Приложения
Печатные платы в формате LAY, исходники и прошивки МК
Ссылки в интернете и литература
№
Название сайтов / книги
Адреса / Авторы
[1]
Википедия — свободная энциклопедия
[2]
Астрономия и физика на ладони
http://astronom-ntl.narod.ru/physmain.htm
[3]
Лабораторные работы по физике
[4]
Microchip Technology Inc. — a Leading Provider of Microcontroller and Analog Semiconductors
[5]
ООО Микро-Чип — микроконтроллеры и источники питания
[6]
Winstar Display Co., Ltd.
http://www.winstar.com.tw/main.php
[7]
International Rectifier
[8]
Vishay — manufacturer of discrete semiconductors and passive components
[9]
Справочник по PIC-микроконтроллерам Пер с англ – М ДМК Пресс, 2002, ООО «Издательский дом «Додэка-XXI», 2002. – 512с.: ил. (Серия «Справочник»).
Предко М.
[10]
PIC-микроконтроллеры. Практика применения. 2004
Тавернье К.
[11]
Микроконтроллеры MicroCHIP. Практическое руководство. 2002
В.С.Яценков
[12]
Справочник по физике для инженеров и студентов Издательство «Наука» главная редакция физико-математической литературы
Б. М. Яворский, А. А. Детлаф
[13]
Основные законы механики
И. Е. Иродов
Список радиоэлементовОбозначение
Тип
Номинал
Количество
ПримечаниеМагазинМой блокнот
Рисунок 5. Главный модуль.DD1
МК PIC 8-битPIC16F628A1
DA1
Линейный регуляторL7805AB1
VT1
MOSFET-транзисторIRFU9024N1
VT2
MOSFET-транзисторIRLU024N1
VD1
Диодный мост2W021
С1-С3, С6, С7
Конденсатор0.1 мкФ5
С4
Электролитический конденсатор220 мкФ 25 В1
С5
Электролитический конденсатор220 мкФ 10 В1
С8, С9
Конденсатор27 пФ2
R1-R3, R11, R12
Резистор4.7 кОм5
R4, R5, R9, R10
Резистор470 Ом4
R6
Резистор10 кОм1
R7
Резистор300 Ом1
R8
Резистор1 Ом1
2 ВтQZ1
Кварцевый резонатор4.096 МГц1
HG1
LCD-дисплейWH2002L-YYB-CT1
SB1, SB2
КнопкаТС-04042
Х1, Х3, Х4
РазьемRS-101G3
Х2
РазьемDS-261B1
Рисунок 9.DD1
МК PIC 8-битPIC16F628A1
DA1
Линейный регуляторL7805AB1
DA2
ИК-приемникTSOP17361
VT1
MOSFET-транзисторIRFU9024N1
VT2
MOSFET-транзисторIRLU024N1
VD1
Диодный мост2W021
VD2-VD5
СветодиодFG-300E5BT4
Или любой другойVD6
ИК-светодиодEIR-303C1
Или любой другой ИК-светодиодС1-С3, С6, С9
Конденсатор0.1 мкФ5
С4
Электролитический конденсатор220 мкФ 25 В1
С5
Электролитический конденсатор220 мкФ 10 В1
С7, С8
Конденсатор27 пФ2
R1-R3, R9
Резистор4.7 кОм4
R4, R5, R7, R8, R11-R14
Резистор470 Ом8
R6
Резистор110 Ом1
1 ВтR10
Резистор10 кОм1
QZ1
Кварцевый резонатор20 МГц1
SB1, SB
КнопкаТС-04042
X1, X3
РазьемRS-101G6
X2
РазьемDS-261B1
X4, X5
Разьемная параWR-2R HU-21
Рисунок 13.U1
Блок питания150 Вт 220/12В1
VT1
MOSFET-транзисторIRL3705N1
VD1
Диод ШотткиMBR10601
VD2
СветодиодFG-300E5BT1
Или любой другойС1, С2
Электролитический конденсатор100 мкФ 25 В2
R1
Резистор1 кОм1
R2
Резистор4.7 кОм1
SA1
ВыключательRS-201-6C1
X1
Сетьевая вилкаAS-207(SS-7B)1
X2, X3
РазьемDG390-5.02
X4, X5
РазьемRS-101G2
HL1
Лампочка35 Вт 12 В1
L1
Нагрузочный электромагнит1
Добавить все