
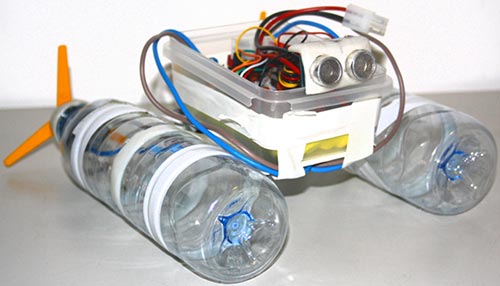
В этой статье описано строительство плавающего робота из доступных материалов. Также эта статья является хорошим примером повторного использования бутылок от воды.
Я использовал два бутылки от воды, полиморфный пластик, два двигателя с винтами, изоленту, корпус, батарею и motoruino (клон Arduino предназначенный для работы с двигателями, сервоприводами и датчиками).
Необходимые материалы:
Две бутылки от воды
Два двигателя постоянного тока
Два винта
Изолента
Корпус
Motoruino (или любой другой микроконтроллер и драйвер двигателя с H-мостом)
Аккумулятор
Установка двигателей и винтов в бутылки

Возьмите бутылку без крышки и вставьте мотор в её горлышко (Можно использовать изоленту если мотор меньше горлышка).
Используйте полиморфный пластик, чтобы загерметизировать бутылку. После этого установите винт.
Соединение бутылок

Я использовал полиморфные трубки для изоляции проводов моторов и изоленту для скрепления бутылок.
Электронная часть

Если вы используете motoruino, вам просто нужно подключить аккумулятор и провода двигателей к нему. Если вы используете Arduino, вам придется использовать драйвер двигателей с Н-мостом.
Я использовал ультразвуковой датчик SFR05, если вы также используете его ориентируйтесь на этот пример:
Запуск робота
Вставьте аккумулятор и Arduino в корпус и поместите его на робота. Прошейте микроконтроллер. Код и прошивка прилагается ниже.
Прикрепленные файлы:
- BoatRobot.pde (3 Кб)