
По роду своей профессиональной деятельности мне часто приходится сталкиваться с проблемой зависания удаленного оборудования. Таковым, например, является комплекс телеметрии, который предназначен для сбора информации о состоянии объекта и передачи информации на большие расстояния до пункта приема и обработки. В основу подобного оборудования положен микроконтроллерный комплект с Центральным Управляющим Модулем (ЦУМ). Именно ЦУМ обеспечивает увязку всех составных модулей, работающих в составе комплекса. Возникают ситуации, при которых ЦУМ зависает (в основном неисправности линий связи) и вывести его из этого состояния можно лишь непосредственно нажав кнопку «Reset». У меня возникла идея дополнить модуль ЦУМ модулем сброса, который контролировал бы его работа и, при необходимости, производил бы его сброс. Ниже привожу описание 2-х вариантов такого модуля:
Модуль сброса ЦУМ ( далее МСЦ) является самостоятельным конструкционным элементом состоящим из микроконтроллера младшего семейства Microchip PIC12f629. Устанавливается в плату ЦУМа и предназначен для сброса при его зависании, служит для восстановления связи между КП и ПУ без участия обслуживающего персонала при условии исправности линии связи.
Первоначально МСЦ предназначался для пассивного сброса ЦУМов и организовывался как программный таймер, обеспечивающий гарантированный сброс ЦУМа через определенный интервал времени (от единиц часов до нескольких суток).
Конструктивно МСЦ выполнен из платы фольгированного текстолита, на котором располагается микроконтроллер и обвязка (индикаторный светодиод, токоограничивающие резисторы и емкость).
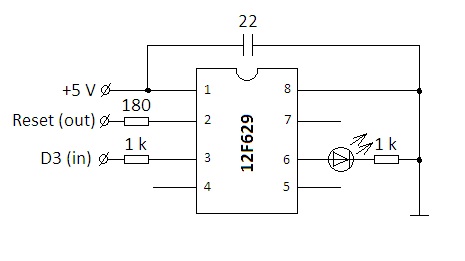
Рис.1 Схема принципиальная МСЦ.
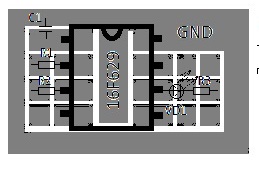
Рис.2 Монтажная схема МСЦ
Описание работы
В первом варианте МСЦ реализован алгоритм пассивного сброса модуля ЦУМ. Микроконтроллер PIC как таймер с последовательной выдержкой по времени 5 часов. По истечении указанного времени на вывод 2 подается лог. «0» длительностью 1 секунда длительностью также 1 секунда, после чего на выводе 2 восстанавливается уровень лог. «1». Светодиод VD1 указывает на нормальную работу модуля и мигает с частотой 0,5 Гц.
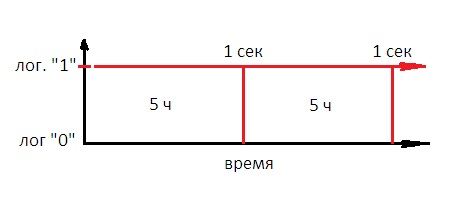
Рис. 3 Временная диаграмма работы МСЦ (первый вариант)
Вариант установки модуля сброса показан на фото:
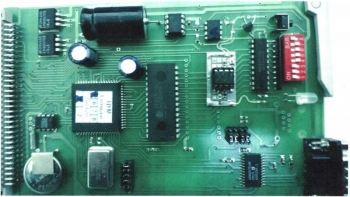
Модуль крепиться к плате 2-хсторонним скотчем.
На фото не показано подключение модуля к контролируемой шине.
Второй вариант модуля (активный) предусматривает возможность отслеживания изменения логических уровней на какой либо шине устройства, в том случае если изменения не происходят в течении установленного времени происходит сброс. В данном случае отслеживание происходит на шине PSP-специального порта микроконтроллера старшего семейства PIC, который используется для связи с модулем модема. При зависании ЦУМа логические сигналы на шине остаются неизменными, и модуль сброса дает команду на сброс. Для технологических целей при включении модуля предусмотрена 30 минутная задержка (для возможности перепрограммирования устройства либо отладки), при этом светодиод мигает с частотой 0,5 Гц. По прошествии времени модуль переходит в рабочий режим и начинает отслеживать момент «зависания», при этом светодиод дублирует состояние отслеживаемой шины.
Программа для первого варианта модуля сброса, написанная в MPLAB: CUM_1.asm
Программа для второго варианта модуля сброса, написанная в MPLAB: CUM_2.asm
Прикрепленные файлы: