

Метеостанция построена на Picaxe микроконтроллере от Revolution Education Ltd и состоит из 2-х основных частей: наружный блок, который посылает свои данные каждые 2 секунды, используя передатчик на частоте 433МГц. И внутренний блок, который отображает полученные данные на 20 х 4 ЖК-дисплее, а также атмосферное давление, которое измеряется локально во внутреннем блоке.
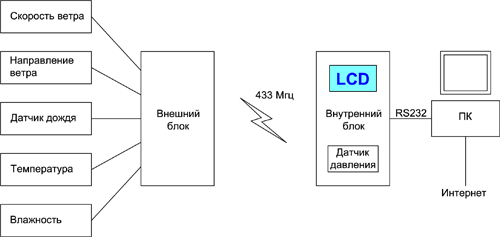
Я пытался сохранить дизайн максимально простым и в то же время функциональным. Связь устройства с компьютером осуществляется через COM-порт. В настоящее время на компьютере непрерывно строятся графики из полученных значений, а также идет отображение значений на обычных индикаторах. Графики и показания датчиков доступны на встроенном веб-сервере, все данные сохранятся и т.о. можно посмотреть данные за любой промежуток времени.

Постройка метеостанции заняло несколько месяцев, от разработки до завершения, и в целом я очень доволен результатом. Я особенно рад, что мне удалось построить все с нуля при помощи обычных инструментов. Меня она полностью устраивает, но совершенству предела нет, и особенно это касается графического интерфейса. Я не предпринял никаких попыток коммерциализации метеостанции, но если вы думаете о создании метеостанции для себя, то это хороший выбор.
Уличные датчики
Датчики используются для измерения температуры, влажности, осадков, направления и скорости ветра. Датчики представляют собой сочетание механических и электронных устройств.
Датчик температуры и относительной влажности воздуха
Измерение температуры, пожалуй, проще всего. Для это используется датчик DS18B20. Для измерения влажности был использован HIH-3610, выдающий напряжение 0.8 — 3.9В при влажности 0% до 100%
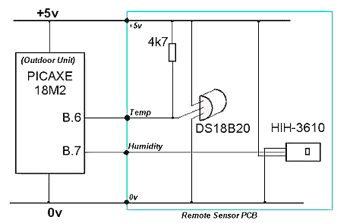
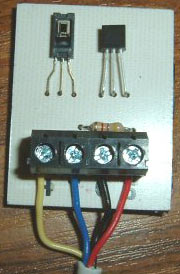
Я установил оба датчика на небольшой печатной плате. Плата установлена внутри самодельного корпуса, который предотвращает воздействие дождя и других внешних факторов.
Упрощенный код для каждого из датчиков приведен ниже. Более точный код, который считывает значения с точностью до одной десятой, показан на сайте Питера Андерсона. Его код используется в окончательном варианте метеостанции.
Датчик температуры обеспечивает точность ± 0.5 °C. Датчик влажности обеспечивает точность до ± 2%, так что это не очень важно, сколько знаков доступно после запятой!
Пример участка из программного обеспечения, работающего на ПК.
Температура
main:
readtemp B.6, b1 ; read value into b1
if b1 > 127 then neg ; test for negative
sertxd (#b1, cr, lf) ; transmit value to PE terminal
pause 5000
goto main
neg:
b1 = b1 — 128 ; adjust neg value
sertxt («-«) ; transmit negative symbol
sertxt (#b1, cr, lf) ; transmit value to PE terminal
pause 5000
goto main
Влажность
main:
readadc B.7,b1 ; read humidity value
b1 = b1 — 41 * 100 / 157 ; change to %RH
sertxd (#b1, «%», cr, lf)
pause 5000 ; wait 5 seconds
goto main
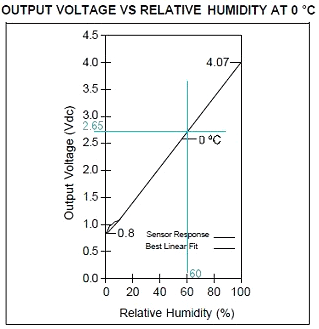
Расчет показаний датчика влажности
Расчеты взяты из документации датчика Honeywell HIH-3610. На графике показывана стандартная зависимость при 0 °C.
Напряжение с датчика измеряется на входе АЦП (B.7) микроконтроллера Picaxe 18M2. В коде, показанном выше, значение, которое представлено в виде числа от 0 до 255 (т.е. 256 значений), хранится в переменной b1.
Наша схема питается от 5В, так что каждый шаг АЦП равен:
5/256 = 0.0195 В.
На графике видно начально значение АЦП 0.8 В:
0.8 / 0.0195 = 41
Взяв значения из графика, наклон графика (с учетом смещения) примерно:
Напряжение выхода / % относительной влажности или
(2.65 — 0.8) / 60 = 0.0308 В в% RH
(В документации 0.0306)
Рассчитаем кол-во шагов АЦП на 1% влажности:
(В на % RH) / (шаг АЦП)
0.0308 / 0.0195 = 1.57
% RH = значение с АЦП — смещение АЦП / (шаги АЦП в % RH), или
% RH = значение с АЦП — 41 / 1.57
Итоговая формула расчет для микроконтроллера будет выглядеть: % RH = значение с АЦП — 41 * 100/157
Защитный корпус

Начните с разрезания каждой панели на две части. Планки на одной части будут крепко прикреплены с 2-х сторон, а на второй части лишь с одной стороны. Не выбрасывайте эти части — они используются.

К целым частям прикрепите два деревянных бруска 20мм х 20мм сверху и с низу, и прикрутите к ним другие части.

Обрежьте одну из частей с одной целой стороной по размеру и приклейте ее к внутренней стороне одной из сторон. Убедитесь, что планки приклеены так, что образуют вместе «^» форму. Сделайте так со всеми сторонами.

Измеритель скорости и направления ветра
Механическая часть
Датчики скорости и направления ветра представляют собой сочетание механических и электронных компонентов. Механическая часть идентична для обеих датчиков.
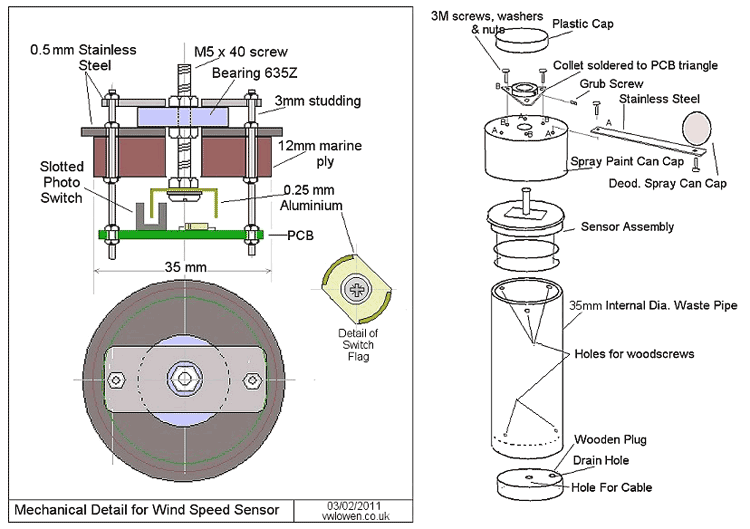
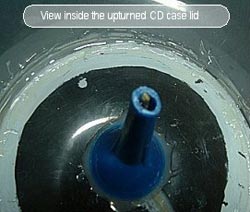
12мм вставка из фанеры (marine ply) находится между трубой из ПВХ и диском из нержавеющей стали в верхнем конце трубы. Подшипник приклеен к диску из нержавеющей стали и удерживается нержавеющей пластиной.

Как лишь все будет полностью собрано и настроено, открытые места герметизируются герметиком для водонепроницаемости.

Остальные три отверстия на фотографии предназначены для лопастей. Лопасти длиной 80 мм дают радиус поворота 95мм. Чашки 50 мм в диаметре. Для них я использовал обрезанные флаконы от одеколона, которые имеют почти сферическую форму. Я не уверен в их надёжности, поэтому сделал их легкозаменяемыми.
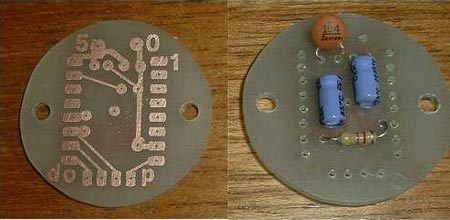
Электронная часть
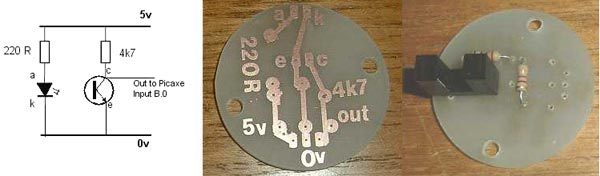
Электроника для датчика скорости ветра состоит лишь из транзисторного ключа, фотодиода и 2-х резисторов. Они монтируются на небольшой круглой ПП диаметром 32мм. Они установлены в трубе свободно, чтобы влага в случае её попадания стекала вниз не задевая электронику.

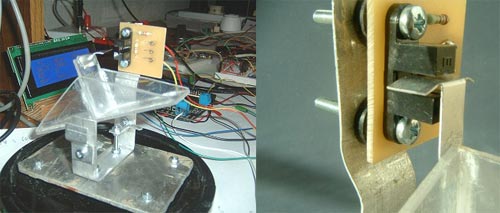
Калибровка анемометра
Анемометр — один из 3-х датчиков, который необходимо откалибровать (два других – счетчик осадков и датчик атмосферного давления)
Фотодиод обеспечивает два импульса за один оборот. В простой «последовательной» системе, к которой я стремился (все датчик опрашиваются поочередно), должен быть компромисс между длиной времени, затрачиваемого на опрос каждого датчика (в данном случае, подсчет импульсов) и отзывчивость системы в целом. В идеале, на полный цикла опроса всех датчиков должно уйти не более 2-3 секунд.

На фото выше проверка датчика при помощью мотора с регулируемыми оборотами.
; LCD-specific commands shown in blue
hsersetup B9600_4, %10000 ; Use LCD Pin 1, no hserin
hserout 0, (13) : pause 100 ; Initialize LCD
hserout 0, (13) : pause 100
hserout 0, (13) : pause 100
pause 500
hserout 0, («ac1», 13) ; Clear display
pause 50
hserout 0, («acc», 13)
hserout 0, («ac81», 13, «adcount: «, 13) ; Print the headings
pause 10
hserout 0, («ac95», 13, «adpulsin: «, 13) ; Print the headings
pause 10
do
count C.2, 1000, w0 ; Count the pulses (two per rev)
w1 = 0
for b8 = 1 to 2 ; Measure pulse length twice
pulsin C.2, 1, w2 ; per rev and…
w1 = w1 + w2
next
w1 = w1 / 2 ; …calculate average
hserout 0, («ac89», 13, «ad «, #w0, » «, 13) ;Print the count value
hserout 0, («ac9d», 13, «ad «, #w1, » «, 13) ;Print the pulse-length value
pause 100
loop
Я хотел откалибровать его при движении на автомобиле, но на это не было времени. Я живу в относительно плоской местности с аэропортом в нескольких километрах рядом, поэтому я калибровал датчик, сравнивая мои показания скорости ветра с показаниями аэропорта.
Если бы мы имели 100% КПД и лопасти вертелись-бы со скоростью ветра, то:
Радиус ротора = 3.75″
Диаметр ротора = 7.5″ = 0.625 фута
Длина окружности ротора = 1.9642 фута
1 фут/мин = 0.0113636 м/ч,
1.9642 фут/мин = 1 об = 0.02232 м/ч
1 м/ч = 1 / 0.02232 об
1 м/ч = 44.8 об
? м/ч = об / 44.8
= (об/мин * 60) / 44.8
Поскольку за поворот выходит два импульса
? м/ч = (импульсов в секунду * 30) / 44.8
= (импульсов в секунду) / 448
Датчик направления ветра — механическая часть
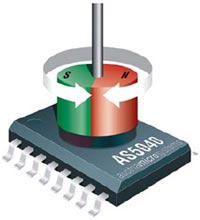
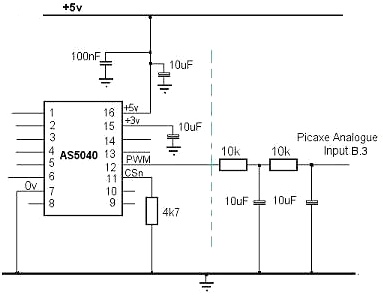
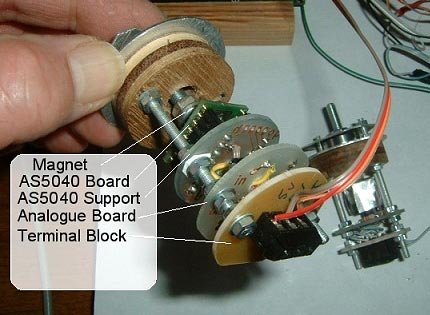
В датчике направления ветра, вместо алюминиевой пластины используется магнит, а вместо оптоэлектронного узла — специальная микросхема AS5040 (магнитный энкодер).
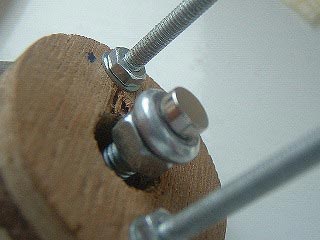
На фото ниже показан 5мм магнит, установленный на торце центрального винта. Выравнивание магнита относительно микросхемы очень важно. Магнит должен быть точно по центру на высоте около 1мм над микросхемой. Как лишь все будет точно выровнено, датчик будет работать правильно.
Датчик направления ветра — электронная часть
Существуют различные схемы для измерения направления ветра. В основном они состоят либо из 8 герконов расположенных под углом 45 градусов с интервалом вращающегося магнита или потенциометра который может полностью проворачиваться.
Оба метода имеют свои преимущества и недостатки. Основным преимуществом является то, что они оба просты в реализации. Недостатком является то, что они подлежат износу — особенно потенциометры. Альтернативой использованию герконов будет использовать датчика Холла для решения механического износа, но они по-прежнему ограничиваются 8 различными позициями … В идеале, я хотел бы попробовать что-то другое и в конечном счете решил о AS5040 — поворотном магнитном датчике IC. Хотя это устройство для поверхностного монтажа (которого я стараюсь избегать), оно имеет ряд преимуществ, которые делают ее использование привлекательным!
Он имеет несколько различных форматов вывода, два из которых наиболее подходит для нашей цели. Наилучшая точность достигается с помощью SSI интерфейса. AS5040 выдает импульсы длиной от 1 мкс при 0° и до 1024 мкс при 359,6°
Проверка калибровки датчика направления ветра:
do
readadc10 B.3, w0 ;Read from AS5040 magnetic bearing
pause 100
w0 = w0 * 64 / 182 ; Convert to 0 — 360 (degrees)
debug ; Display in Prog/Edit debug window
loop

Измеритель уровня осадков
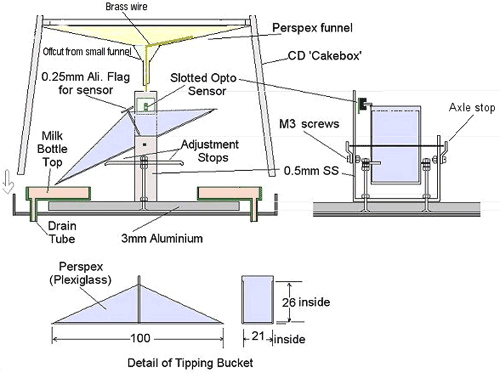
Насколько это возможно, я сделал дождемер из пластика и нержавеющей стали, основание сделано из алюминия толщиной 3 мм для жесткости.
В измерителе уровня осадков есть две ведерка. Каждое ведерко вмещает до 6 мл воды до его смещения центра тяжести, которое заставляет его вылить воду в ёмкость и подать сигнал на датчик. Когда ведро опрокидывается, алюминий флаг проходит через оптический датчик, посылающий сигнал на электронику наружного блока.

На данный момент, я оставил его с прозрачными стенками (потому что интересно наблюдать это работает!). Но я подозреваю, что нужно покрасить его белой краской, чтобы отражать тепло летом, во избежание испарения. Я не мог найти маленькую воронку, поэтому пришлось сделать её самому. Обратите внимание на проволоку внутри воронки и по центру желоба. Это поможет остановить поверхностное натяжение воды в воронке и помогает капать воде. Без проволоки, дождь имел бы тенденцию к «водовороту», и его траектория была-бы непредсказуемой
Оптодатчики крупным планом:
Электронная часть дождемера
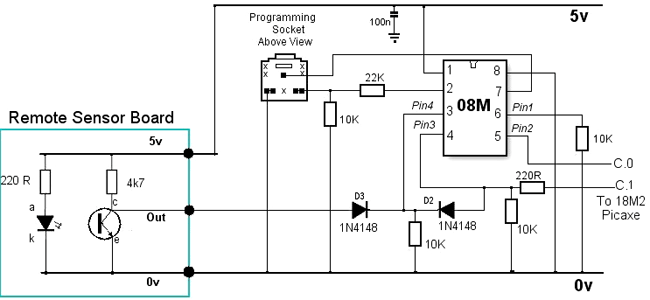
Из-за случайного характера работы датчика, программное прерывание в микроконтроллере наружного блока, казалось, логичный подход. К сожалению, некоторые команды программы, отключают механизм прерываний в то время, как они выполняются, т.о. есть вероятность, что сигнал придет в никуда. По этим причинам, дождемер имеет собственный микроконтроллер 08М Picaxe.
Использование отдельного чипа позволяет использовать его для создания достаточно точной 1-часовой задержки для того, чтобы считать ведра в час.
#picaxe 08M
Symbol ThisHour = b2 ; Store the current sensor count in b2
Symbol LastHour = b3 ; Save the previous hour’s count in b3
;Hardware definitions
Symbol DataRequest = pin3
Symbol BucketSensor = pin4
setint %00010000, %00010000 ; pin4 is interrupt pin
main:
for w0 = 1 to 60000 ; Loop for 1 hour
pause 60
next
LastHour = ThisHour ; Update Last hour’s count with
ThisHour = 0 ; current hour & reset current hour
goto main ; Do the next hour
interrupt:
setint %00010000, %00010000 ; Re-instate interrupt
if DataRequest = 1 then ; Was the interrupt from the 18M2 ?
serout 2, N2400, («r», LastHour, ThisHour) ; Yes, so send previous hour’s count & curent count.
do : loop while DataRequest = 1 ; Wait until 18M2 stops requesting before continuing
endif
if BucketSensor = 1 then ; Was the interrupt from the rain sensor?
inc ThisHour ; Yes, so increment bucket-tip count
do : loop while BucketSensor = 1 ; Make sure flag has cleared sensor before continuing
endif
return
Калибровка
Picaxe 18м2 получает текущее количество ведерок в час и выводит его на дисплей и компьютер.
В качестве отправной точки, я использую следующие данные:
Воронка диаметров 120мм и емкость площадью 11,311мм2
1 мм дождя = 11,311мм3 или 11,3 мл.
Каждое ведро это 5,65 мл. Таким образом, 2 ведра 2 х 5,65 = 11,3 мл (или 1 мм) осадков. Одно ведро = 0,5 мм осадков.
Для сверки, я купил дешевый стакан для измерения осадков.
Наружный блок
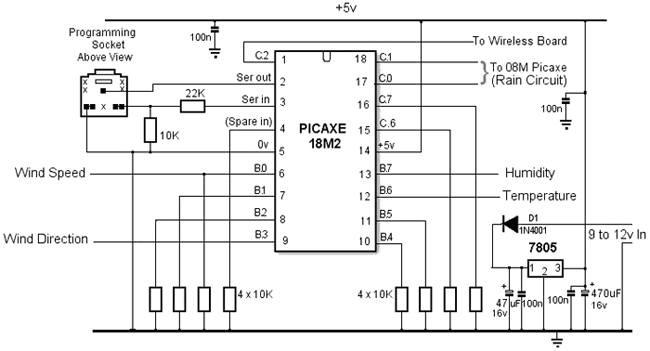
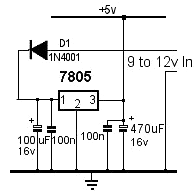
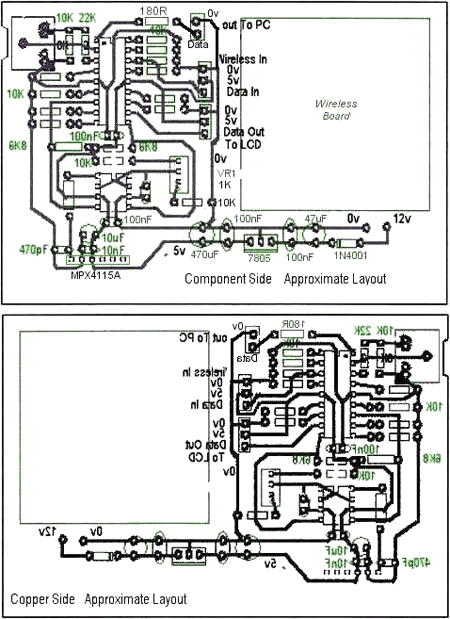
Для вышеприведенной схемы и схемы 08М Picaxe для датчика используется одна и та же топология печатной платы. Устройство питается от аккумулятора 12V 7Ah через стабилизатор 7805.
Я использовал набор RF Connect kit для беспроводной связи на 433 МГц. Комплект содержит пару специально запрограммированных PIC контроллеров. Комплект беспроводных модулей в ходе испытаний зарекомендовал себя как достаточно надежный.
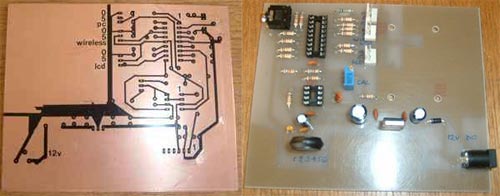
Печатная плата
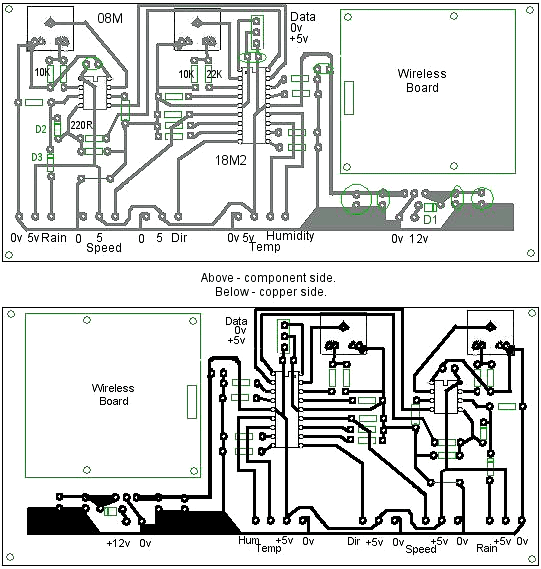
На ПП установлен 08М Picaxe и 18м2. Каждый из них имеет свой собственный разъем программирования. Отдельные разъемы, каждый со своим +5 В, предназначены для каждого датчика — за исключением температуры и влажности.
Обратите внимание, что я нарисовал чертёж в Paintshop Pro поэтому я не могу гарантировать точность расстояния между выводами.

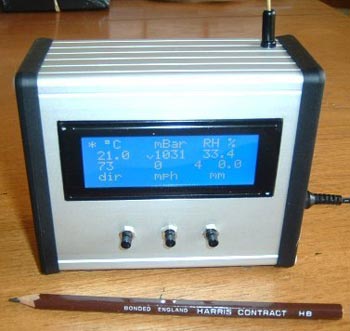
Внутренний блок
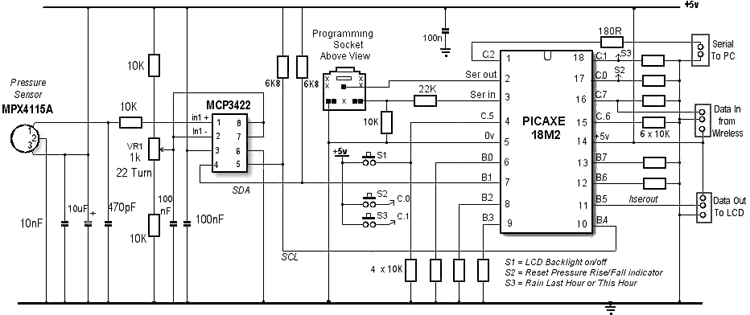
Во внутреннем блоке используетя 18м2 Picaxe, датчик давления и ЖК-дисплей. Также есть стабилизатор напряжения 5В.
Датчик давления
После нескольких неудачных попыток, я остановился на MPX4115A. Хотя другие датчики имеют диапазон измерения немного больше, они труднодоступны. Кроме того, другие датчики, как правило, работают от 3,3В и требуют дополнительный стабилизатор. MPX4115A выдает аналоговое напряжение от 3,79 и до 4,25В пропорционально давлению. Хотя это почти достаточное разрешение для обнаружения 1 мбар изменения давления, после некоторого обсуждения на форуме, я добавил АЦП MCP3422. Он может работать в 16-битном режиме (или выше) по сравнению с 10-битном режиме Picaxe. MCP3422 может быть связан (как в нашей схеме) в дифференциальный режим с аналоговым входом от датчика. Основным преимуществом является то, что это позволяет корректировать выход датчика, тем самым легко компенсировать ошибки MPX4115A и обеспечить простой способ калибровки датчика.
MPC3422 на самом деле имеет два дифференциальных входа, но так-как один не используется они замкнуты. Выход из MCP3422 имеет интерфейс I2C и соединяется с SDA и SCL контактам на 18м2 Picaxe – выводы B.1 и B.4 соответственно. С моей точки зрения, единственный недостаток в использовании MCP3422 том, что это небольшое устройство для поверхностного монтажа, но я его припаял к адаптеру. В дополнение к I2C интерфейсу MCP3422 18м2 просто обрабатывает поступающие данные из 433МГц беспроводной приемник, выводит данные на дисплей и передает данные на ПК. Для того чтобы избежать ошибок внутреннего блока когда компьютер не работает, нет никаких ответов от ПК. Внутренний блок передает данные и идет дальше. Он передает данные приблизительно в 2-секундным интервалом, чтобы потери данных быстро компенсировались следующий раз. Я использовал незадействованные порты на 18м2 для подключения кнопки на передней панели. Переключатель S1 (вход С.5) используется для включения подсветки ЖК-дисплея. Переключатель S2 (вход C.0) сбрасывает значение давления (мбар) на ЖК-дисплее. Переключатель S3 (вход C.1) переключает осадки отображаемые на ЖК-дисплее между общим в предыдущий час и текущими. Кнопки необходимо удерживать более 1 секунды для их реакции.
Сборка внутреннего блока
Как и в печатной плате для наружного блока, я нарисовал макет вручную с помощью Paintshop Pro, так что в расстояниях могут быть ошибки
Плата немного больше, чем это необходимо, чтобы вписаться в пазы в алюминиевом корпусе.
Я сознательно сделал разъем для программирования немного «внутрь» от края платы, чтобы предотвратить его прикосновение к корпусу. Вырез для ЖК-дисплея производится высверливание и подгонкой до точных размеров.

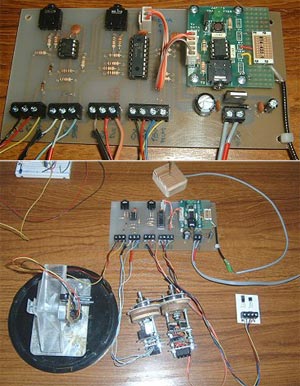
На фото показано всё уже установленное в корпус.
Штырьки на плате делают сложным её установку в корпус, поэтому мне пришлось отпаять их и припаять дисплей к плате проводами.
Внешний блок — код Picaxe
; ==================================================================
; Main 18M2 code for the Picaxe Weather Station Outdoor (Transmitter) Unit
; Decimal precision Humidity & Temperature routines,
; copyright, Peter H Anderson, Baltimore, MD, Jan, ’04
;
; ==================================================================
#Picaxe 18M2
Symbol HValue = w0
Symbol HighWord = w1
Symbol LowWord = w2
Symbol RH10 = w3
Symbol HQuotient = b0
Symbol HFract = b1
Symbol X = b0
Symbol aDig = b1
Symbol TFactor = b2
Symbol Tc = b3
Symbol SignBit = b4
Symbol TValue = w4
Symbol TQuotient = b10
Symbol TFract = b11
Symbol TempC_100 = w6
Symbol MagDir = w7
Symbol MagDirLo = b14
Symbol MagDirHi = b15
Symbol WindSpeed = w8
Symbol WindSpeedLo = b16
Symbol WindSpeedHi = b17
Symbol ThisHour = b18
Symbol LastHour = b19
Symbol RainRequest = b20
; Hardware
Symbol HumidRaw = B.7
Symbol TempRaw = B.6
Symbol DirRaw = B.3
Symbol Speed = B.0
do
; Read Humidity
ReadADC10 HumidRaw, HValue ;Get Humidity (HValue)
HighWord = 1613 ** HValue ; calculate RH
LowWord = 1613 * HValue
RH10 = LowWord / 1024
LowWord = Highword * 64
RH10 = RH10 + LowWord
RH10 = RH10 — 258
pause 100
; Read temperature
Readtemp12 TempRaw, TValue ; Get temperature
SignBit = TValue / 256 / 128
if SignBit = 0 then positive ; It’s negative so
TValue = TValue ^ $ffff + 1 ; take twos comp
positive:
TempC_100 = TValue * 6 ; TC = value * 0.0625
TValue = TValue * 25 / 100
TempC_100 = TempC_100 + TValue
TQuotient = TempC_100 / 100
TFract = TempC_100 % 100 / 10
X = TQuotient / 10 ; Calculate temperature correction factor for Humidity
if SignBit = 0 then
SignBit = » »
else
SignBit = «-»
endif
if SignBit = «-» then
X = 4 — X
else
X = X + 4
endif
GoSub TempCorrection ; compensate RH
HQuotient = RH10 / 10 ; Calculate RH Quotient and…
HFract = RH10 % 10 ; …decimal place.
if HQuotient > 99 then ; Over range
HQuotient = 99
HFract = 9
endif
if HQuotient > 127 then ; Under range
HQuotient = 0
HFract = 0
endif
; Read AS540 magnetic encoder for wind direction
readadc10 DirRaw, MagDir ; Read from AS5040 magnetic bearing
pause 100
; Read rpm from windspeed counter
count Speed, 1000, WindSpeed
; Every 30th cycle (approx 1 minute), request rain gauge data from 08M
inc RainRequest
if RainRequest >= 30 then
high C.1
serin [500], C.0, N2400, («r»), LastHour, ThisHour ; Rain counters
low C.1
RainRequest = 0
endif
; Send data to Indoor Unit in 8 byte blocks
; First group needs no calibration so calculations are done here first.
; Second group will need «tweaking» — more easily done at indoor end.
serout C.2, N2400, («t», SignBit, TQuotient, TFract, HQuotient, HFract, «A», «B»)
pause 100
serout C.2, N2400, («m», MagDirHi, MagDirLo, WindSpeedHi, WindSpeedLo, LastHour, ThisHour, «C»)
loop
TempCorrection:
Lookup X, (87, 89, 91, 93, 95, 97, 99, 101, 103, 106, 108, 110, 113, 116, 119, 122, 126), TFactor
‘ -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 100 110 120
if TFactor < 100 then
aDig = TFactor / 10
RH10 = RH10 * aDig / 10
TFactor = TFactor % 10
aDig = TFactor
RH10 = RH10 * aDig / 100 + RH10
else
TFactor = TFactor % 100
aDig = TFactor / 10
RH10 = RH10 * aDig / 10 + RH10
TFactor = TFactor % 10
aDig = TFactor
RH10 = RH10 * aDig / 100 + RH10
endif
return
Использовано памяти = 295 байт из 2048
Счетчик количества осадков — 08M код
#picaxe 08M
Symbol ThisHour = b2 ; Store the current sensor count in b2
Symbol LastHour = b3 ; Save the previous hour’s count in b3
;Hardware definitions
Symbol DataRequest = pin3
Symbol BucketSensor = pin4
setint %00010000, %00010000 ; pin4 is interrupt pin
main:
for w0 = 1 to 60000 ; Loop for 1 hour
pause 60
next
LastHour = ThisHour ; Update Last hour’s count with
ThisHour = 0 ; current hour & reset current hour
goto main ; Do the next hour
interrupt:
setint %00010000, %00010000 ; Re-instate interrupt
if DataRequest = 1 then ; Was the interrupt from the 18M2 ?
serout 2, N2400, («r», LastHour, ThisHour) ; Yes, so send previous hour’s count & curent count.
do : loop while DataRequest = 1 ; Wait until 18M2 stops requesting before continuing
endif
if BucketSensor = 1 then ; Was the interrupt from the rain sensor?
inc ThisHour ; Yes, so increment bucket-tip count
do : loop while BucketSensor = 1 ; Make sure flag has cleared sensor before continuing
endif
return
Внутренний блок — код Picaxe
;============================================================================
; Main Indoor (Receiver) Program.
;
; Receives data from outdoor unit, displays on LCD and passes data on to PC
; Also measures the barometric pressure (thanks to ‘matherp’)
;============================================================================
#PICAXE 18M2
; Variable Definitions (b2 to b5 are re-used for mBar code when they become available)
symbol Quotient = b2
symbol Fract = b3
symbol SignBit = b4
symbol Humidity = b5
symbol HFract = b14
symbol Dir = w5
symbol DirLo = b10
symbol DirHi = b11
symbol Speed = w3
symbol SpeedLo = b6
symbol SpeedHi = b7
symbol RainCountThisHour = b12
symbol RainCountLastHour = b13
symbol LCDRainWhole = b21
symbol LCDRainFract = b22
symbol LastOrThis = b23
; MCP3422 ADC variables
symbol mb900 = 17429 ; ADC reading for 900Mbar, then add 72.288 counts per mbar
symbol adj0 = 72
symbol mBarADCValue = w0
symbol adj1 = b4 ; used to add 1 count every 4 mbar
symbol adj2 = b5 ; used to add 1 count every 24 mbar
symbol mBar = w4
; Housekeeping variables
symbol lastmbar = w8 ; Remember previous mBar reading
symbol RiseFall = b18 ; Indicator for pressure rising or falling (up arrow or down arrow)
symbol active = b19 ; Telltale shows activity on LCD screen
symbol LCD_Status = b20 ; Is LCD Backlight on or off (0 or 1)?
; Hardware Definitions
symbol Wireless = C.7 ; Incoming connection from Wireless receiver/decoder
symbol Computer = C.2 ; Outgoing serial connection to computer
symbol LCD = pinC.5 ; Front-panel button to blank / unblank LCD backlight
symbol ClearRiseFall = pinC.0 ; Front-panel button to clear pressure ‘rising / falling’ indicator
symbol LastOrThisSwitch = pinC.1 ; Front-panel button to display current or previous hour’s rainfall
Init:
hsersetup B9600_4, %10000 ; Use LCD Pin 1, no hserin
; ByVac 20×4 IASI-2 Serial LCD
hi2csetup i2cmaster, %11010000, i2cfast, i2cbyte ; Initialize I2C for MCP3422 ADC chip.
hi2cout (%00011000) ; set MCP3422 for 16 bit continuous conversion
pause 500
hserout 0, (13) : pause 100 ; Initialize LCD
hserout 0, (13) : pause 100
hserout 0, (13) : pause 100
pause 500
hserout 0, («ac50», 13)
hserout 0, («ad», 32, 32, 32, 32, 49, 42, 36, 32, 13) ; Define down arrow character (char 10)
hserout 0, («ac1», 13) ; Clear display
pause 50
hserout 0, («acc», 13) ; Hide cursor
hserout 0, («ac81», 13, «ad «, $df, «C», 13) ; Print the headings
hserout 0, («ac88», 13, «admBar», 13)
hserout 0, («ac8e», 13, «adRH %», 13)
hserout 0, («acd5», 13, «ad», «dir», 13) ; Print footings
hserout 0, («acdc», 13, «ad», «mph», 13) ;
hserout 0, («ace3», 13, «ad», «mm», 13)
lastmbar = 0 ; Initialize variables
LastOrThis = «c»
;==========================================================================
; Main Loop
;==========================================================================
main:
; Check if a front-panel switch is pressed. The Picaxe interrupt mechanism is
; almost permanently disabled due to the large number of serin and serout commands
; so sprinkling the program with ‘gosub switches’ to check the switch status is more
; effective that interrupts.
gosub switches
; Get first group of values from outdoor unit via 433MHz radio link.
serin Wireless, N2400, («t»), SignBit, Quotient, Fract, Humidity, HFract, b15, b15
; Flash ‘telltale’ on LCD to indicate activity and successful ‘serin’ from wireless.
gosub telltale
; Display first group on LCD
hserout 0, («acc0», 13)
hserout 0, («ad», SignBit, #Quotient, «.», #Fract, » «, 13)
hserout 0, («acce», 13)
hserout 0, («ad», #Humidity,».», #HFract, » «, 13)
gosub switches
; Send first group to computer COM port
; Each group has a start identifier, data and an end identifier:
; Start = «xS», End is «xE» eg Wind Start is WS, Wind End is WE
; Multiple data are separated by a single space character.
serout Computer, N2400, («TS», SignBit, #Quotient,» «, #Fract, «TE») ; Temperature
serout Computer, N2400, («HS», #Humidity, » «, #HFract, «HE») ; Humidity
; Check switches again and at regular intervals throughout program.
gosub switches
; Get second group of values from outdoor unit radio link.
serin Wireless, N2400, («m»), DirHi, DirLo, SpeedHi, SpeedLo, RainCountLastHour, RainCountThisHour, b15
gosub telltale
Speed = Speed * 300 / 448 ; Estimated conversion from pulses/sec to mph
Dir = Dir * 64 / 182 ; Convert 0 — 1023 to 0 — 359 degrees
; To preserve precision, rain gauge has to be calibrated by adjusting the
; mechanical stops on the tipping bucket so that 1 tip is 0.5 mm of rain.
if LastOrThis = «c» then ; Decide whether to display previous hour’s
LCDRainWhole = RainCountThisHour / 2 ; rainfall or the current hour’s.
LCDRainFract = RainCountThisHour * 5 // 10
else
LCDRainWhole = RainCountLastHour / 2 ;
LCDRainFract = RainCountLastHour * 5 // 10
endif
; Send second group to LCD
hserout 0, («ac95», 13)
hserout 0, («ad», #Dir, » «, 13)
hserout 0, («ac9c», 13)
hserout 0, («ad», #Speed, » «, 13)
hserout 0, («aca1», 13)
hserout 0, («ad», LastOrThis, » «, #LCDRainWhole, «.», #LCDRainFract, » «, 13)
; Send second group to computer COM port
serout Computer, N2400, («WS», #Dir,» «, #Speed, «WE») ; Wind
serout Computer, N2400, («RS», #RainCountLastHour,» «, #RainCountThisHour, «RE») ; Rain
gosub switches
; Thanks to ‘matherp’ on the Picaxe forum for the mbar code loop:
; Measuring atmosperic pressure with a MPX4115A
; Analogue to digital conversion using a MCP3422
; MPX output to V+, 2.5V to V-
; ADC in 16 bit mode
hi2cin (b1,b0,b2) ; Read in the ADC reading and the status byte from MCP3422
adj1 = 0
adj2 = 0
w1 = mb900
mbar = 900
do while mBarADCValue > w1 ; mBarADCValue = w0 = b1:b0
inc mbar
w1 = w1 + adj0
inc adj1
if adj1 = 4 then
inc adj2
w1 = w1 + 1
adj1 = 0
endif
if adj2 = 6 then
w1 = w1 + 1
adj2 = 0
endif
loop
gosub switches
gosub telltale
; Send pressure to computer COM port
serout Computer, N2400, («PS:», #mbar, «PE»)
; Initialize previous pressure reading (lastmbar) if not already set
if lastmbar = 0 then
lastmbar = mbar
RiseFall = » »
endif
; Display up arrow or down arrow if pressure has changed
if mbar > lastmbar then
RiseFall = «^» ; ^
lastmbar = mbar
endif
if mbar < lastmbar then
RiseFall = 10 ; Custom LCD character. Down arrow
lastmbar = mbar
endif
hserout 0, («acc7», 13)
hserout 0, («ad», RiseFall, #mbar, » «,13)
gosub telltale
goto main
; Check if one of the front panel buttons is pressed.
switches:
if LCD = 1 then ; LCD Backlight on/off Button is pressed
if LCD_Status = 0 then ; Backlight is on so…
hserout 0, («ab0», 13) ; Turn it off
LCD_Status = 1
else
hserout 0, («ab1″, 13) ; Else turn it on.
LCD_Status = 0
endif
do: loop while LCD = 1 ; Don’t return while button is pressed
endif
if ClearRiseFall = 1 then ; Pressure rise/fall button is pressed
RiseFall = » » ; Clear indicator and…
hserout 0, («acc7», 13) ; … update display.
hserout 0, («ad», RiseFall, #mbar, » «,13)
do: loop while ClearRiseFall = 1
endif
if LastOrThisSwitch = 1 then ; Rain Previous Hour / Last Hour button.
if LastOrThis = «c» then
LastOrThis = «p»
LCDRainWhole = RainCountLastHour / 2 ; Recalculate values and re-display to
LCDRainFract = RainCountLastHour * 5 // 10 ; give visual confirmation of button-press
else
LastorThis = «c»
LCDRainWhole = RainCountThisHour / 2 ;
LCDRainFract = RainCountThisHour * 5 // 10
endif
hserout 0, («aca1», 13)
hserout 0, («ad», LastOrThis, » «, #LCDRainWhole, «.», #LCDRainFract, » «, 13)
do : loop while LastOrThisSwitch = 1
endif
return
; Flash «tell-tale» on LCD display to show activity
telltale:
if active = «*» then
active = » »
else
active = «*»
endif
hserout 0, («ac80», 13, «ad», active, 13)
return
Использовано памяти = 764 байт из 2048
Программное обеспечение для ПК
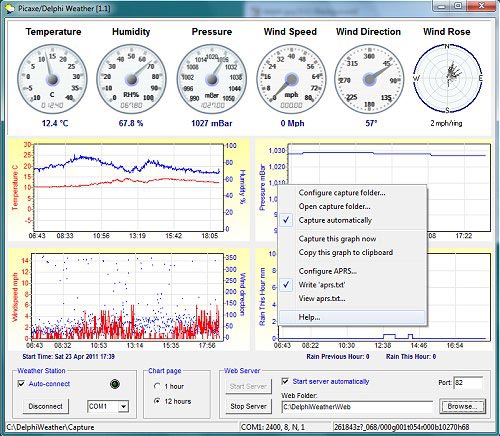
Программное обеспечение, работающее на ПК было написано с использованием Borland Delphi 7. Оно довольно примитивно в его нынешнем виде, но это, по крайней мере, показывает связь Picaxe с компьютером.
Графики могут быть выбраны для показа в период 1 час или 12 часов. Графики можно прокручивать вперёд-назад с помощью мышки. Они могут быть сохранены. Для этого необходимо кликнуть по ним правой кнопкой мыши и указать имя и файл значения. Можно настроить ограниченный набор APRS данных, записываемых раз в минуту на одну строку файла APRS.TXT и которые сохраняются в той же папке, где находится Weather.exe. Отмечу, что температура в градусах по Фаренгейту и осадки в 1/100ths на дюйм.
Список радиоэлементовОбозначение
Тип
Номинал
Количество
ПримечаниеМагазинМой блокнот
Датчик температуры и относительной влажности воздуха
Датчик температурыDS18B201
Датчик влажностиHIH-36101
Резистор4.7 кОм1
Измеритель скорости и направления ветра
ФототранзисторИК1
СветодиодИК1
Резистор220 Ом1
Резистор4.7 кОм1
Магнитный энкодерAS50401
Электролитический конденсатор10 мкФ4
Конденсатор100 нФ1
Резистор4.7 кОм1
Резистор10 кОм1
Измеритель уровня осадков
МК PICAXEPICAXE-08M1
Выпрямительный диод1N41482
Конденсатор100 нФ1
Резистор4.7 кОм1
Резистор10 кОм4
Резистор22 кОм1
Резистор220 Ом2
СветодиодИК1
ФототранзисторИК1
Наружный блок
МК PICAXEPICAXE-18M21
Выпрямительный диод1N40012
Линейный регуляторLM7805CT2
Два стабилизатора 5В
Электролитический конденсатор47 мкФ2
Электролитический конденсатор470 мкФ2
Конденсатор100 нФ4
Резистор22 кОм1
Резистор10 кОм9
Внутренний блок
МК PICAXEPICAXE-18M21
АЦПMCP34221
Датчик давленияMPX4115A1
Конденсатор100 нФ3
Конденсатор470 пФ1
Электролитический конденсатор10 мкФ2
Конденсатор10 нФ1
Резистор10 кОм14
Резистор6.8 кОм2
Резистор180 Ом1
Резистор22 кОм1
Переменный резистор1 кОм1
Добавить все
2 comments on “Метеостанция своими руками”
Здравствуйте! Подскажите, метеостанция, которую вы сделали своими руками рабочая? ставили опыт? Ищу альтернативный аппарат метеостанции, вы еще занимаетесь своим проектом?
Здравствуйте. На этом сайте лишь собираются схемы электронных устройств со всего Интернета. В конце статьи есть ссылка Оригинал статьи, автора лучше поискать там.