
Ниже представлена схема датчика движения с использованием Arduino. В качестве датчика, мы будем использовать PIR-сенсор (Passive Infrared sensor), т.е. пассивный ИК датчик. PIR-сенсоры основаны на методике измерения инфракрасного излучения от обьектов.

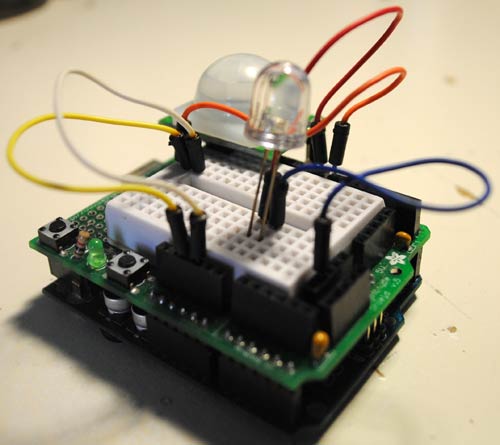
Итак, для создания ИК датчика движения нам понадобятся следующие компоненты:
контроллер Arduino
макетная плата
1 светодиод
PIR сенсор фирмы Parallax
провода
Схема подключения датчика движения (PIR) к контроллеру Arduino простейшая:
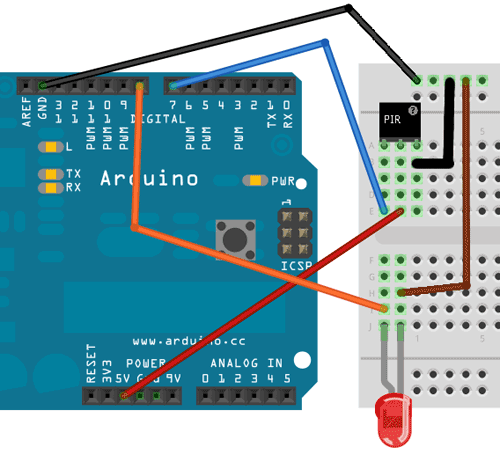
PIR-сенсор имеет 3 вывода: плюс, минус и выход. К 7-му выводу Arduino подключаем выход PIR-сенсора. Также, присоединим светодиод к выводу 8 Arduino и GND.
Исходный код программы взят с официального сайта arduino.cc:
/*
* //////////////////////////////////////////////////
* //making sense of the Parallax PIR sensor’s output
* //////////////////////////////////////////////////
*
* Switches a LED according to the state of the sensors output pin.
* Determines the beginning and end of continuous motion sequences.
*
* @author: Kristian Gohlke / krigoo (_) gmail (_) com / http://krx.at
* @date: 3. September 2006
*
* kr1 (cleft) 2006
* released under a creative commons «Attribution-NonCommercial-ShareAlike 2.0» license
* http://creativecommons.org/licenses/by-nc-sa/2.0/de/
*
*
* The Parallax PIR Sensor is an easy to use digital infrared motion sensor module.
* (http://www.parallax.com/detail.asp?product_id=555-28027)
*
* The sensor’s output pin goes to HIGH if motion is present.
* However, even if motion is present it goes to LOW from time to time,
* which might give the impression no motion is present.
* This program deals with this issue by ignoring LOW-phases shorter than a given time,
* assuming continuous motion is present during these phases.
*
*/
/////////////////////////////
//VARS
//Время калибровки датчика (10-60 сек. по даташиту)
int calibrationTime = 30;
//the time when the sensor outputs a low impulse
long unsigned int lowIn;
//the amount of milliseconds the sensor has to be low
//before we assume all motion has stopped
long unsigned int pause = 5000;
boolean lockLow = true;
boolean takeLowTime;
int pirPin = 7; //вывод подключения PIR сенсора
int ledPin = 8;
/////////////////////////////
//SETUP
void setup(){
Serial.begin(9600);
pinMode(pirPin, INPUT);
pinMode(ledPin, OUTPUT);
digitalWrite(pirPin, LOW);
//дадим датчику время на калибровку
Serial.print(«calibrating sensor «);
for(int i = 0; i < calibrationTime; i++){
Serial.print(«.»);
delay(1000);
}
Serial.println(» done»);
Serial.println(«SENSOR ACTIVE»);
delay(50);
}
////////////////////////////
//LOOP
void loop(){
if(digitalRead(pirPin) == HIGH){
digitalWrite(ledPin, HIGH); //the led visualizes the sensors output pin state
if(lockLow){
//makes sure we wait for a transition to LOW before any further output is made:
lockLow = false;
Serial.println(«—«);
Serial.print(«motion detected at «);
Serial.print(millis()/1000);
Serial.println(» sec»);
delay(50);
}
takeLowTime = true;
}
if(digitalRead(pirPin) == LOW){
digitalWrite(ledPin, LOW); //the led visualizes the sensors output pin state
if(takeLowTime){
lowIn = millis(); //save the time of the transition from high to LOW
takeLowTime = false; //make sure this is only done at the start of a LOW phase
}
//if the sensor is low for more than the given pause,
//we assume that no more motion is going to happen
if(!lockLow && millis() — lowIn > pause){
//makes sure this block of code is only executed again after
//a new motion sequence has been detected
lockLow = true;
Serial.print(«motion ended at «); //output
Serial.print((millis() — pause)/1000);
Serial.println(» sec»);
delay(50);
}
}
}
В скетче Arduino видно, что датчик проводит самодиагностику, а далее переходит в режим отслеживания движений. Когда движение обнаружено, то загорается светодиод. По Serial Monitor вы можете отслеживать сколько по времени длилось движение.
Данный проект можно использовать как основу для обнаружения движения в охранных сигнализациях, для включения освещения, в робототехнике и т.п.
Оригинал статьи на английском языке (перевод Колтыков А.В. )