

Как часто вы забывали покормить своих рыбок?
Ну, что касается меня, то это происходит довольно редко. Я не могу просто уехать из города на пару дней и далее думать на кого оставить свой аквариум.
После того, как я приобрел Sparkfun RedBoard, было принято решение создать автоматическое устройство для подачи корма в аквариум.
Ну, что ж, поехали…
Шаг 1: Список используемых компонентов
* Arduino UNO или совместимый микрокомпьютер.
* Адаптер питания напряжением 9В или 12В.
* Шаговый двигатель с напряжением питания 5В из старого дисковода гибких дисков.
* Перегородка от ящика с инструментами, нужна именно гладкая перегородка, которую я установлю сверху подвижной крышки.
* Рычажный выключатель от стационарного телефона для индикации правильности закрытия крышки.
* Корпус от жесткого диска в качестве контейнера для корма.
* Сломанная пластиковая линейка или любая гладкая пластина.
* Штатив CCTV-камеры.
* Один резистор номиналом 10 кОм.
* Механический AC Таймер.
Шаг 2: Сборка



Конструкция кормушки, которая сделана из старых материалов, показана на рисунке номер 1. Я вырезал отверстие с одной стороны корпуса от жесткого диска. Может для вас будет легче использовать бутылку от минеральной воды, однако для бутылки нужна опора, которая будет удерживать ее в перевернутом положении.
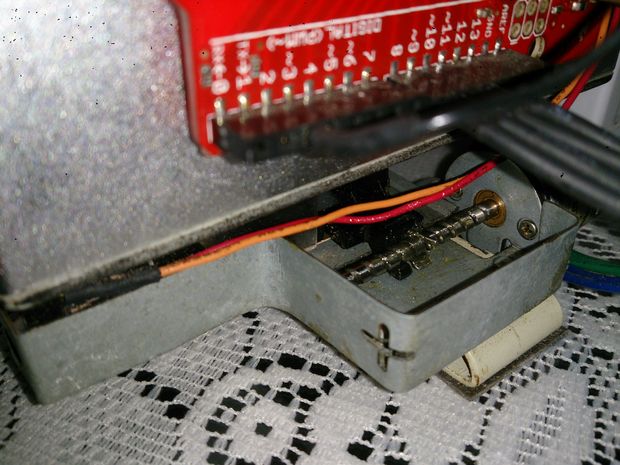
Я использовал вот такой штатив CCTV-камеры. Далее мне было нужно всего лишь просверлить отверстие в корпусе. Корпус имеет идеальную высоту, что позволяет установить под него шаговый двигатель (рисунок номер 2 и 3).
Далее для перемещения крышки я использовал шаговый двигатель напряжением 5В с червячной направляющей вместе с ее подвижным механизмом из дисковода гибких дисков (компонент, используемый для перемещения линз дисковода; рисунки номер 3 и 4). Я поместил небольшую гладкую пластиковую перегородку от ящика с инструментами сверху держателя линз, ниже отверстия корпуса, где предполагается выход гранул корма (рисунок номер 2). Вы также можете использовать поломанную линейку. Оставьте пол или один миллиметр от нижней части корпуса, иначе гранулы корма не смогут пройти через закрытую крышку.
Шаг 3: Доработка корпуса

Контроль прохождения потока гранул корма через отверстие, большие гранулы не задерживаются в левой и правой части корпуса.

После нескольких дней использования я обнаружил дефект на корпусе. Корм не выходил, хотя в контейнере было ещё много корма.
Затем я понял, что гранулы не проходят, как было задумано. Вот почему мне была нужна поломанная линейка или любая гладкая пластина, которая подойдет в контейнер и образует «V»-образную форму. Теперь все гранулы корма будут проходить через отверстие.
Шаг 4: Электронные компоненты




Установите шаговый двигатель, выключатель, резистор 10 кОм, как показано на рисунке выше. Использование макетной платы облегчит тестирование и понимание работы схемы. Макетную плату можно будет использовать для другого проекта (смотрите последний рисунок выше, без макетной платы).
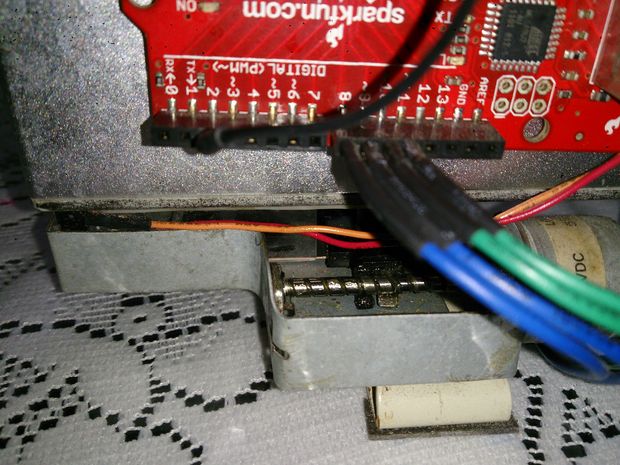
Подключите четыре провода шагового двигателя к цифровым выводам 8, 9, 10, 11.
Далее одну ножку выключателя к выводу питания 5В.
Другую ножку подключите к земле через резистор 10 кОм и также не забудьте подсоединить к цифровому выводу 2.
Поместите выключатель спереди подвижной крышки, и согните металлическую часть, сделав стопор (оранжевый и красный кабели на третьем рисунке). Когда выключатель перемещается вперед и нажимает на стопор, микроконтроллер arduino регистрирует значение HIGH на выводе выключателя и останавливает двигатель.
Я прикрепил изолентой свою плату RedBoard (arduino UNO) сзади корпуса, а таймер с вилкой на его боковой стороне. Таймер с вилкой используется в качестве баланса для корпуса, чтобы он правильно стоял.
Первый выход корма происходит правильно. При втором выходе корма видно, что если гранулы корма слиплись, и крышка неправильно закрыта, тогда крышка перемещается назад и вперед, пока не закроется надлежащим образом.
Теперь вам не нужно брать аквариум с собой в отпуск. Только не забудьте перед отъездом насыпать корм в контейнер.
Прикрепленные файлы:
- auto_fish_feeder.ino (1 Кб)